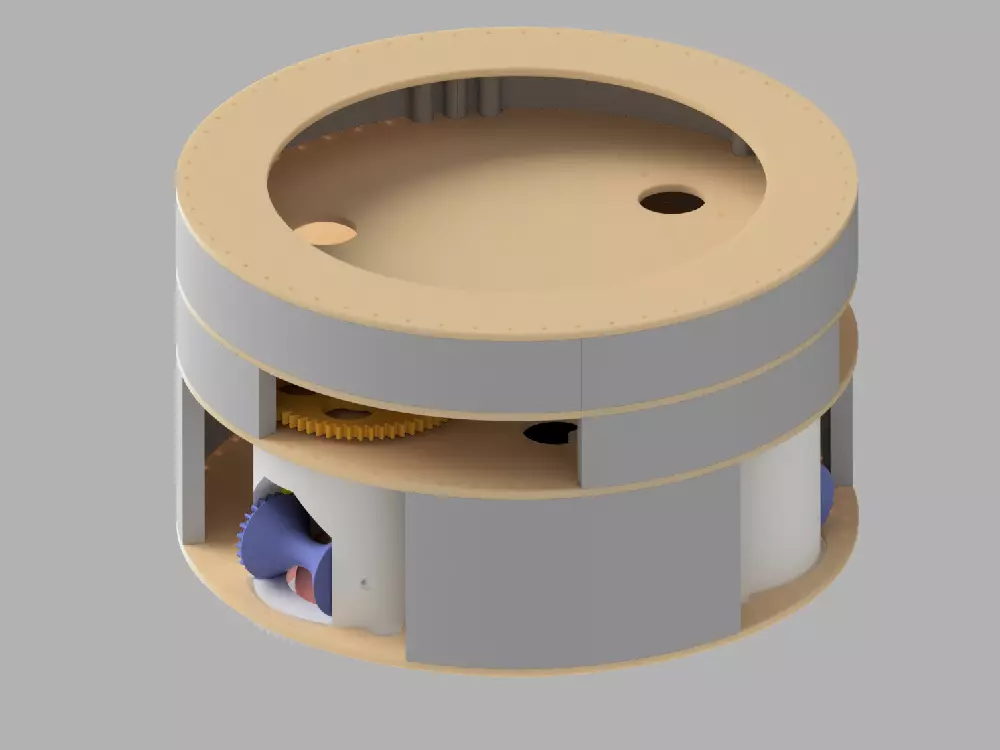
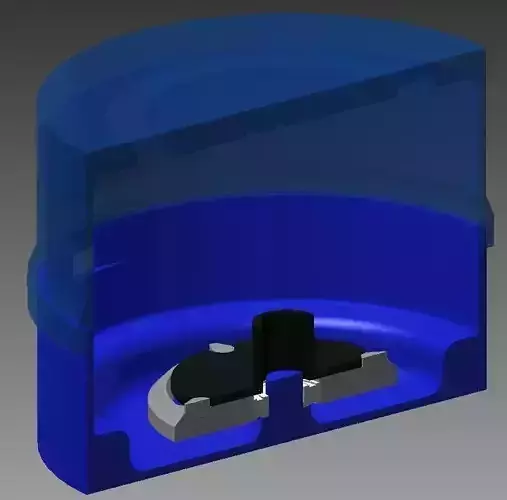
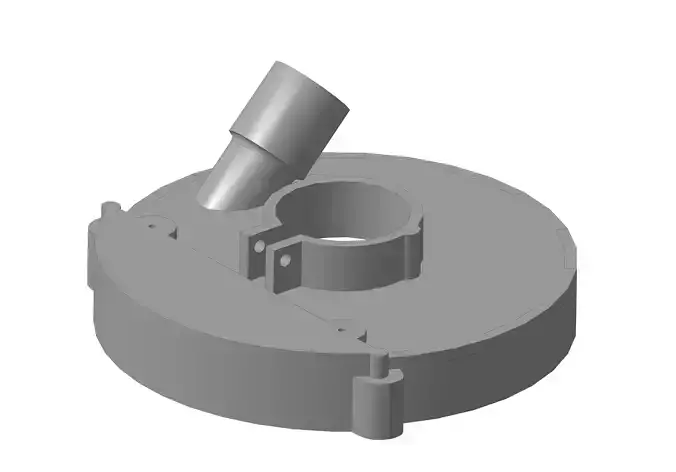
this is a synchro drive mechanism that can be used to propel a robot in the xy-plane. the mechanism cannot rotate the robot about its vertical axis. two motors are used, one to drive the robot and one to orient the wheels.two nema 17 stepper motors and two tb6600 driver have been used. an arduino uno controls the motion. currently the arduino receives signals from an rc controller. it should run autonomously in the future though.
most parts are 3d printed in pla. the plates are laser cut from poplar plywood since they are a bit large for my 3d printer. several additional components (motor, motor driver, arduino, aluminum flanges, ball bearings, hi-bounce balls, etc. i got from aliexpress and other sources.
more information on the project can be found here:https://www.muellerr.ch/synchro-drive-robot/