






Printable Quadruped arduino and raspberry quadruped robotics 3D print model
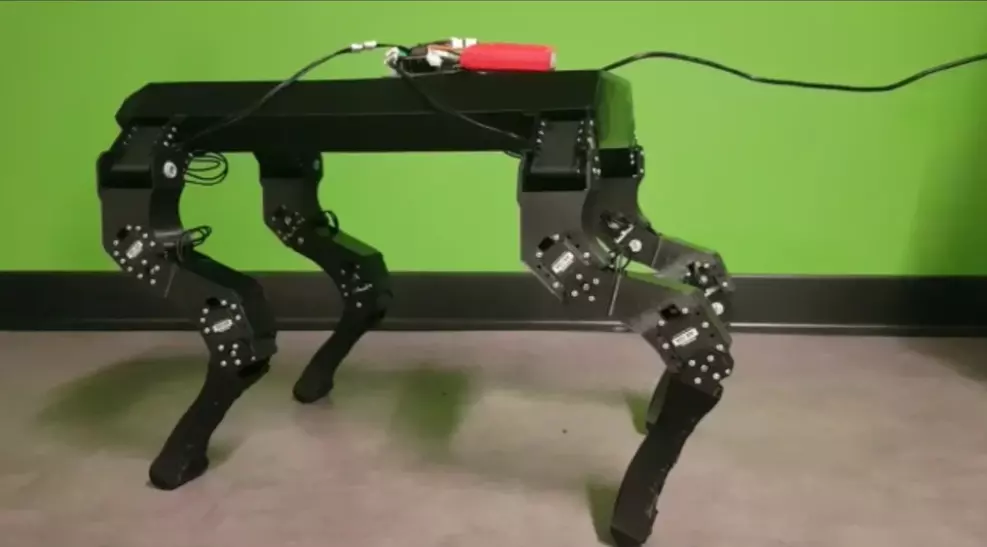
Enik robot is a quadrupedal robot designed for contribute to both students and researchers studies about the code information in a practical way. At the same time, this robot is a useful prototype to develop larger four-legged robot. 12 AX 12-A Dynamixel smart servo motor used in this robot. This project can help to improve both researchers and students’ code ability. Students and researchers are able to add gyro sensor for balance ,or distance sensor for control the robot more safely. 12V power supply used for energy but any lipo battery(11.1 V) can not be used because OpenCM 485 Expansion board have a lipo socket.
The main aim of this project is that contribute to both students and researchers studies about the code information in a practical way. At the same time, this robot is a useful prototype to develop larger four-legged robot. The robot’s technical desing is available in the link and it can be produced by using 3D printer.
OverviewThis project can help to improve both researchers and students’ code ability. Students and researchers are able to add gyro sensor for balance ,or distance sensor for control the robot more safely. 12V power supply used for energy but any lipo battery(11.1 V) can not be used because OpenCM 485 Expansion board have a lipo socket.
In this Project, robot communicated with directly on computer with USB cable. Command send in COM port screen but OpenCM 9.04-C microcontroller have a RX TX communication socket so any wireless module can be use for communicate to the Enik such as HC-06 Bluetooth module.
Mechanical Desing
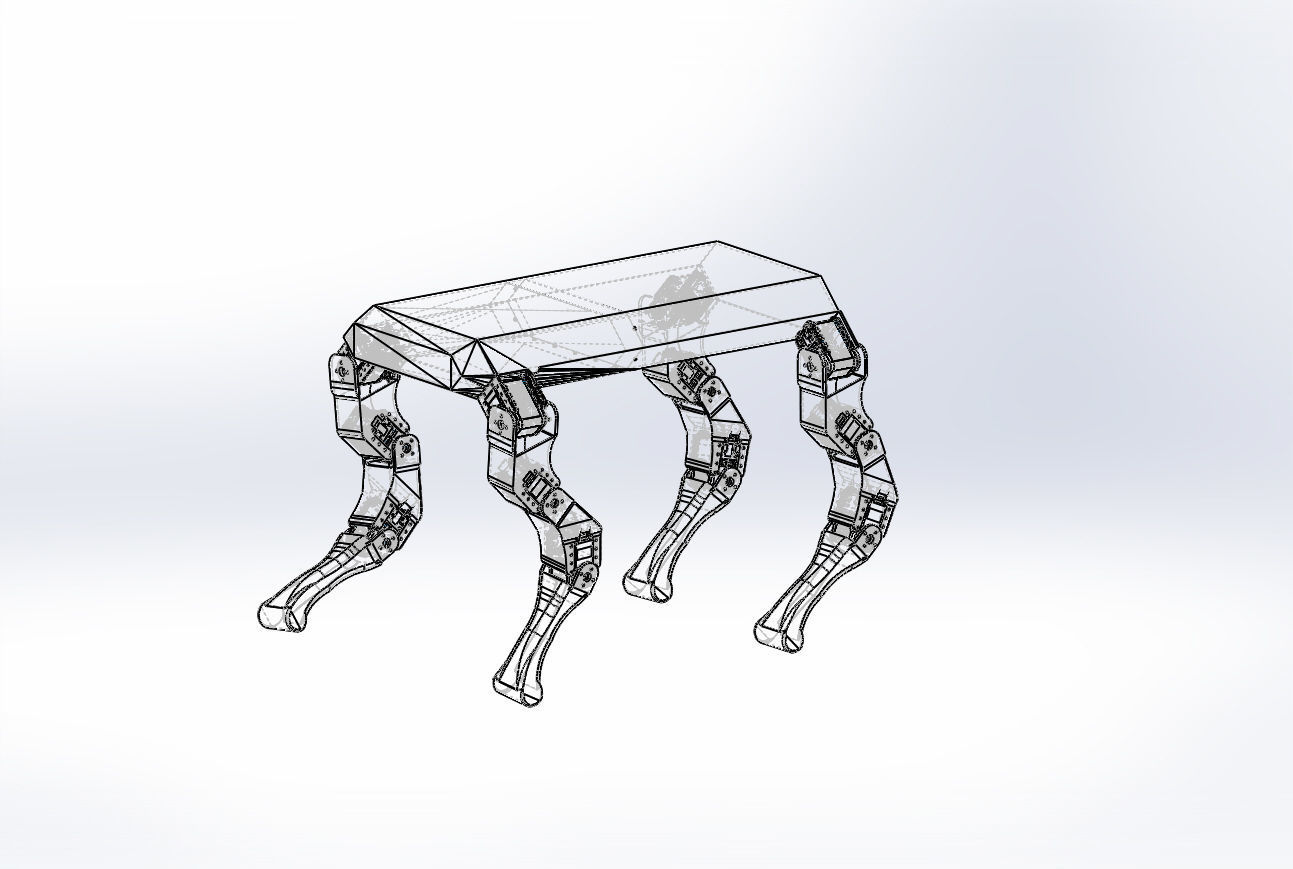
All parts are designed in Solidworks 2015. Robot has 14 parts and 5 different type. Each part has a servo hub but servo hubs designed just for Dynamixel smart servo motors. However,anyone can change the design for their own electronic system via using open source. All parts created in 3d printer and used PLA filaments.
Electronics
12 servo motor https://amzn.to/3WqetX8 or 2 https://amzn.to/3FTyuyb
Producted by 3d printer https://amzn.to/3YSvTgO
Li-po battery https://amzn.to/3FVsJzT
The system have 1 motor driver(opencm 9.03), 1 microcontroller, 12 servo motor and 1 of power supply. Expensionboard(opencm) have 3 different type socket. Lipo, SMPS DC adapter and Dynamixel pro power so robot can befeeded lipo battery in the lipo socked. Cable communication used in this Project.
This project is an Arduino based quadrupeds robot which can be controlled through a Raspberry Pi. The robot has four legs and each leg has two motors. Each motor will control the movement of the leg. This project uses a servo motor as well as a stepper motor to control the movements of the robot. A Raspberry Pi 3B+ is used to control the robot. Product Features:
- Can run on battery or power supply.
- Uses a Raspberry Pi 3B+.
- Servos are used to control the movement of the robot.
- Steppers are used to control the speed of the robot.
Thank you for your support !

3D Model formats
Format limitations
- Stereolithography (.stl) (5 files)2.71 MB
- SolidWorks (.sldprt, .sldasm, .slddrw) (5 files)18.9 MB
3D Model details
- Ready for 3D Printing
- Publish date2020-12-14
- Model ID#2759679
Similar Models

Users who bought this item also bought...