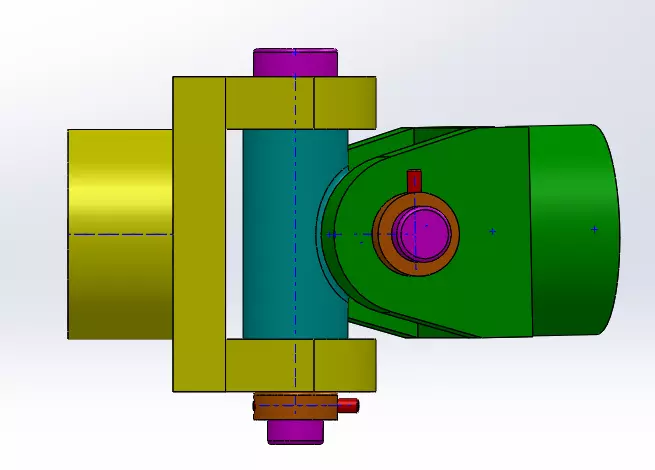
A universal joint is a positive, mechanical connection between rotating shafts, which are usually not parallel, but intersecting. They are used to transmIt motion, power, or both. The simplest and most common type is called the Cardan joint or Hooke joint.The simplest and most common type is called the Cardan joint or Hooke joint. It is shown in Figure 1. It consists of two yokes, one on each shaft, connected by a cross-shaped intermediate member called the spider. The angle between the two shafts is called the operating angle. It Is generally, but not necessarily, constant during operation. Good design practice calls for low operating angles, often less than 25°, dependIng on the application. Independent of this guideline, mechanical interference In th e construction of Cardan joints limits the operating angle to a maximum (often about 37½°), depending on its proportions.