


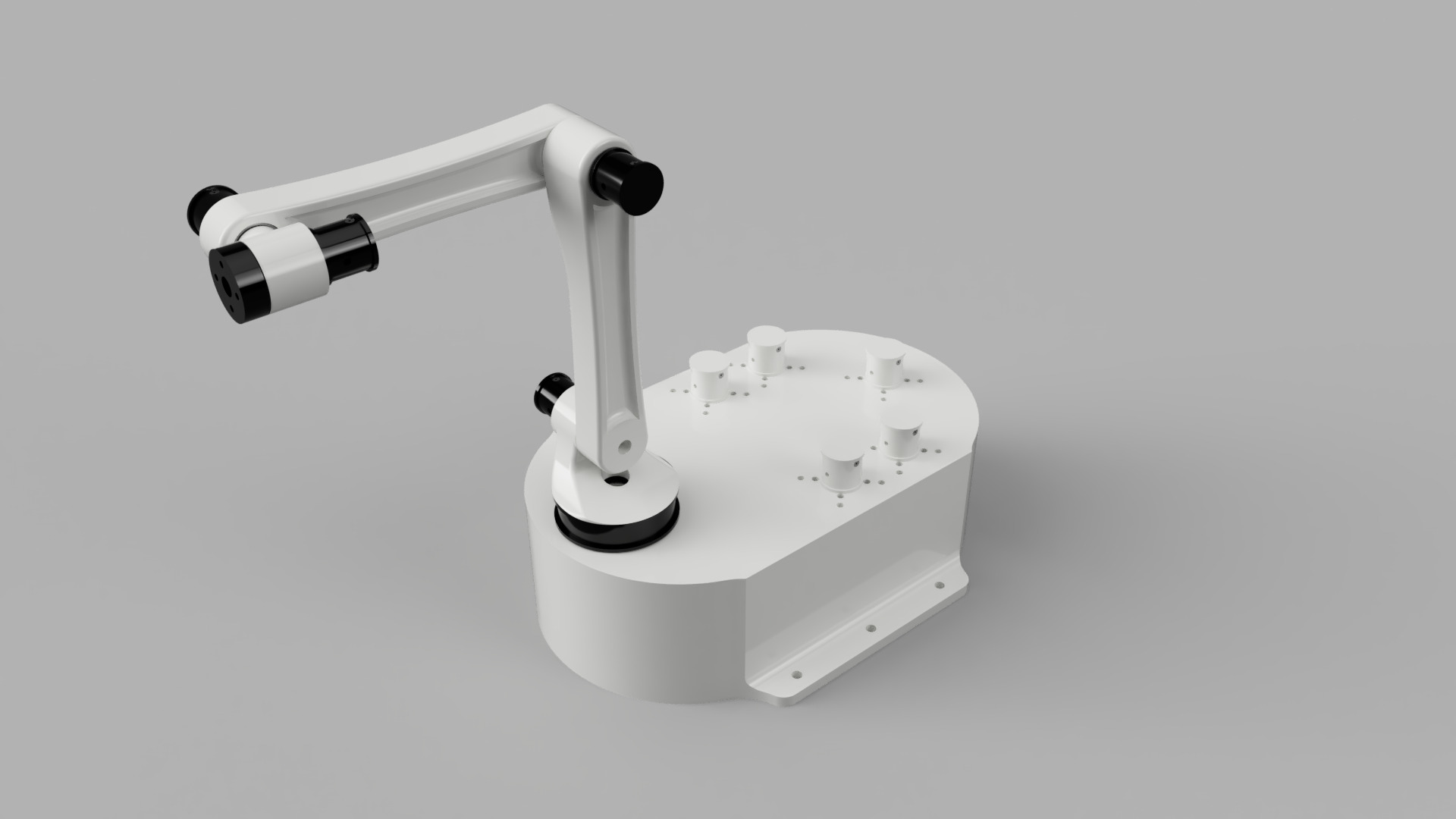
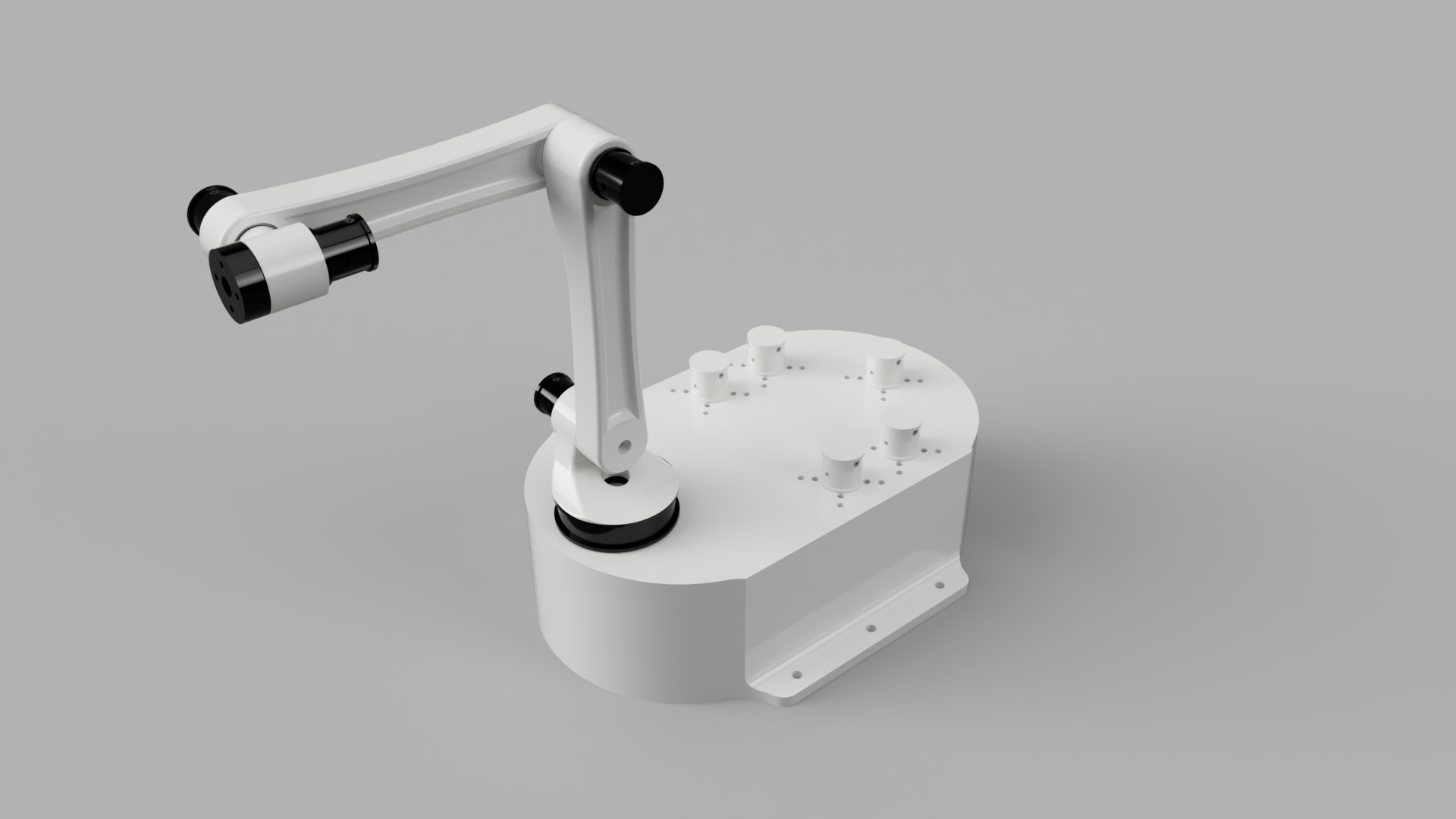


Robotic Arm With Cable Drive 3D print model
University project, a robotic arm with 5 controlled axis, the base is around 20cm and axis length is about 15cm. It uses cables routed thru guides to transfer motion from the engines to the axis (kindof like bicycle breaks), two cables on each side of the hub, transferring motion in a closed loop, the cables are not represented in the model.The design has a high range of motion and is very light, easily 3d-printable, and includes tolerances, the main benefit of it's design being a sturdy base and light arm.Every axis has bearings.Components:-8x 608 bearings-5x nema 17 motors with gearbox-8mm metal rod-1x 6006 bearing-3mm screws of different sizes
This is a conceptual design, while it is created for the purpouse of being made and working, it was never tested and thus might present flaws!
Similar Models

Users who bought this item also bought...
