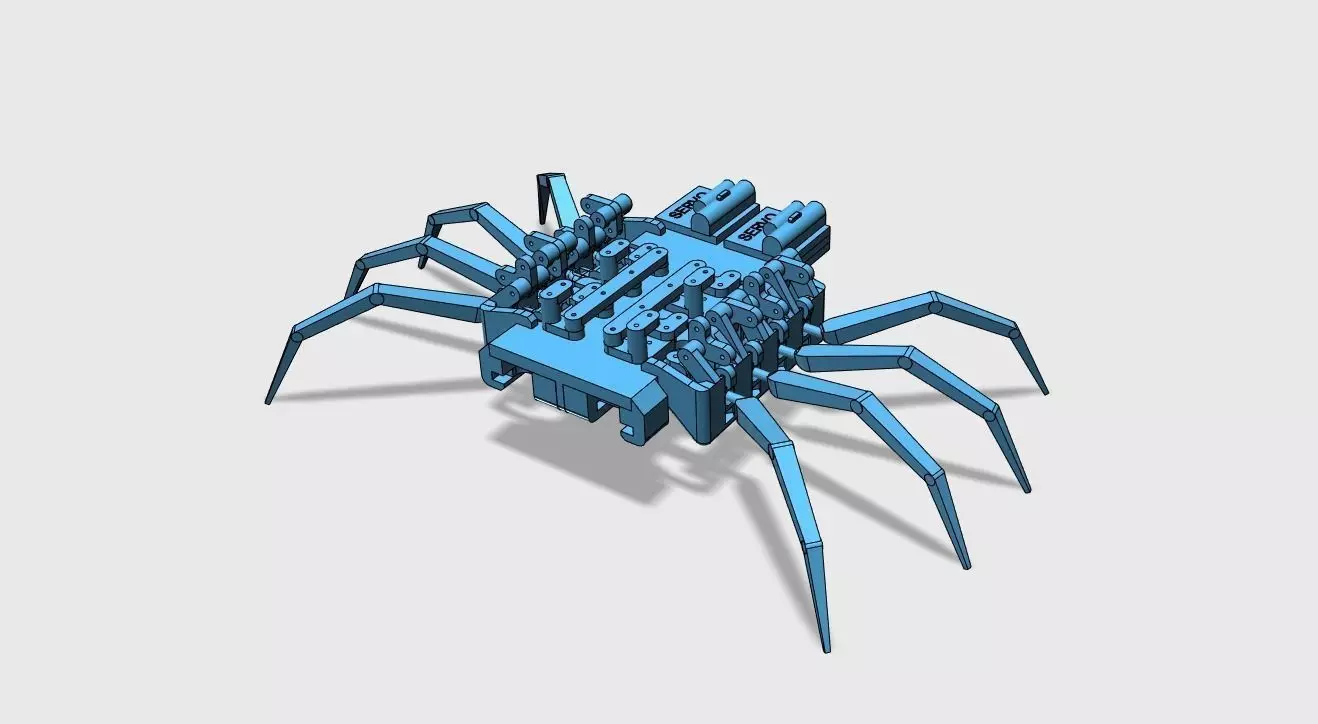
These files are the Fusion 360 source files of this project.
All files are completely 3D pritable. The goal of this robot was to keep it as simple as possible but remain the most important movements. This robot uses 4 micro servo's salvaged from old and broken indoor rc-planes and helicopters. these servo's are controlled by an arduino nano and powered by two 1 cell 200mAh lipo battery's. To control the movement of the robot I use a Bluetooth transeiver connected with an android device. This allows me to make the robot go forwards, backwards, turn left and turn right.
Feel free to like the video and subscribe to my youtube chanel. This helps me a lot and you get notification from future video’s. Thank you in advance!
video of this robot walking can be found here : https://www.youtube.com/watch?v=Hj8gsWjy_DY&t=68slink to my youtube chanel : https://www.youtube.com/channel/UCRs9vVRoVo4BTBceFRaJnpAmore info about this project can be found here : https://hackaday.io/project/26049-8-legged-spider-robot