Video can be found here: https://youtu.be/1jqYdFrZqFI
These files are the Fusion 360 source files of this project
More info, schematics, parts list, etc... can be found here:https://hackaday.io/project/187309-3d-printable-strain-wave-gearbox-harmonic-drive
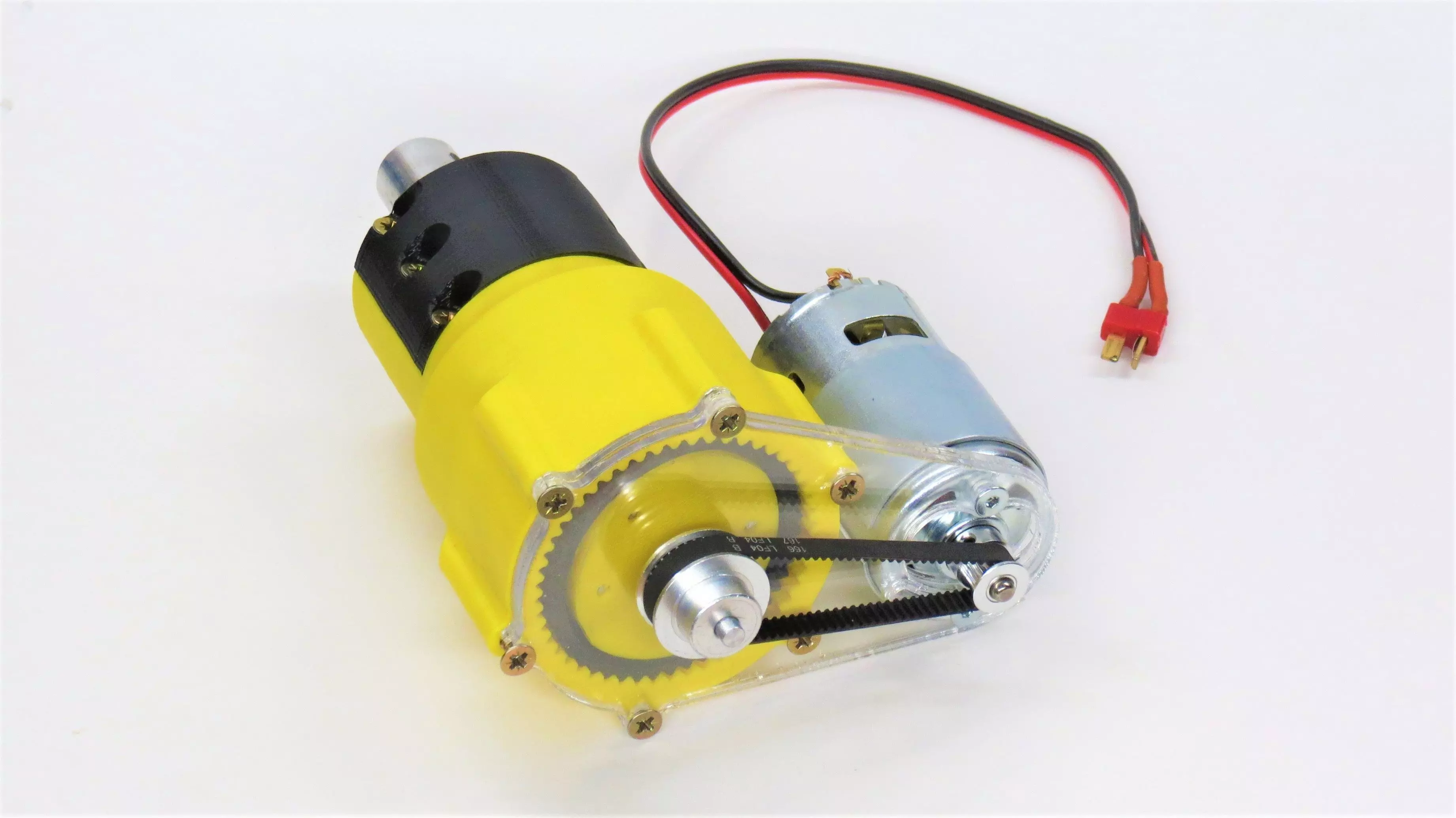
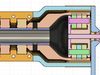
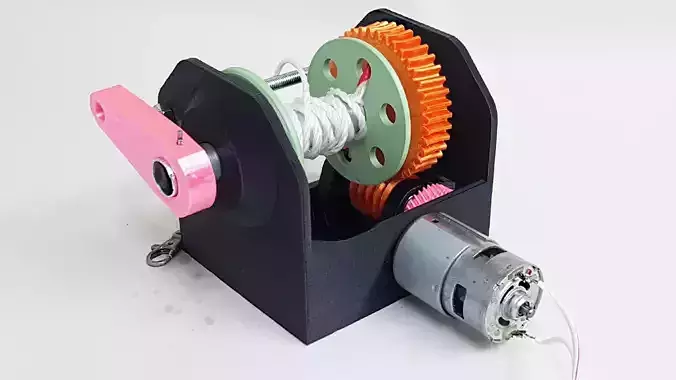
I was fascinated by this type of gearbox and always wanted to make one. This type of gearbox is one of the most used in industrial robots. This type of gearbox only has a single reduction (in this case 2 because of the belt reduction) with a very high reduction ratio. Because of the single stage reduction there's almost no tolerance/play between input and output shaft. Conventional gearboxes use more gears to achieve the same reduction ratio, the tolerances between the gears add up resulting in greater tolerances/play between the input and output shaft.
Here are some specifications of the gearbox:Max tested torque at 12V: 41.3kgcm or 4NmTotal reduction ratio = 54:1
Big thank you to PCBWay for sponsoring this project. Due a price drop in raw materials, PCBWay can now provide PCB's at a reduced price. Use my referral link to get a 5$ discount when you sing up as a new user: https://www.pcbway.com/setinvite.aspx?inviteid=586251
Tools and materials I'm using can be found here: https://bbprojects.technology/pages/tools-and-materials