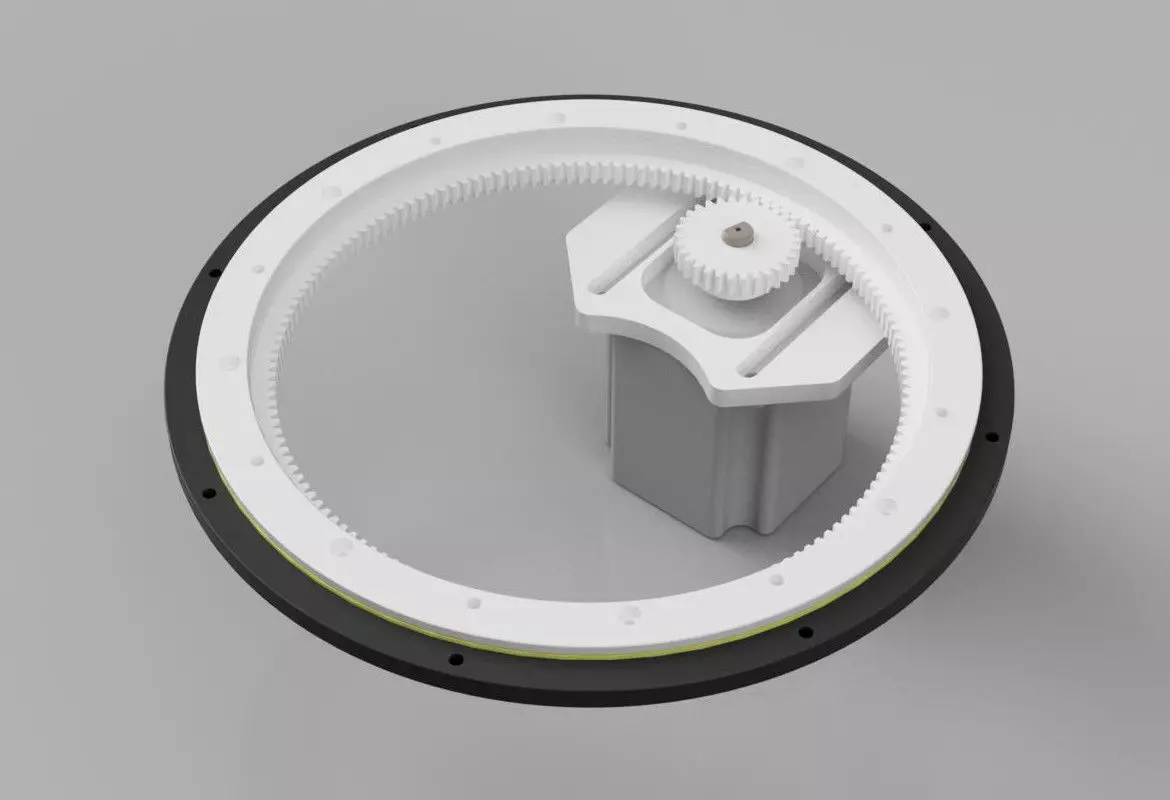
This is a sliding bearing gear for telescope, robotic arm or any mechanism that needs controlled rotation around Z axis (mainly Z, as load distributes evenly). Gear ratio 1:6 for Nema17 motor, and 1:5 for Nema23 motor.
3D-print with 0.8 mm print-head:
- 2xD-SBG_IgusRing12: Iglidur-L170/180PF, infill 100 %.
- all other parts: PC, infill 40-60 %.Thread D-SBG_Moving Inner Ring1_wGear with M3 and assemble using 8xM3x12.Use 6xM3(M4)x30 and 2xM3(M4)x40 to fix D-SBG_Fixed Outer Ring to table together with D-SBG_Motor Holder_NEMA17 or D-SBG_Motor Holder_NEMA23.
Fixing to table: D192 mm, fixing to arm/mechanism: D168 mm.
Works like charm!:)