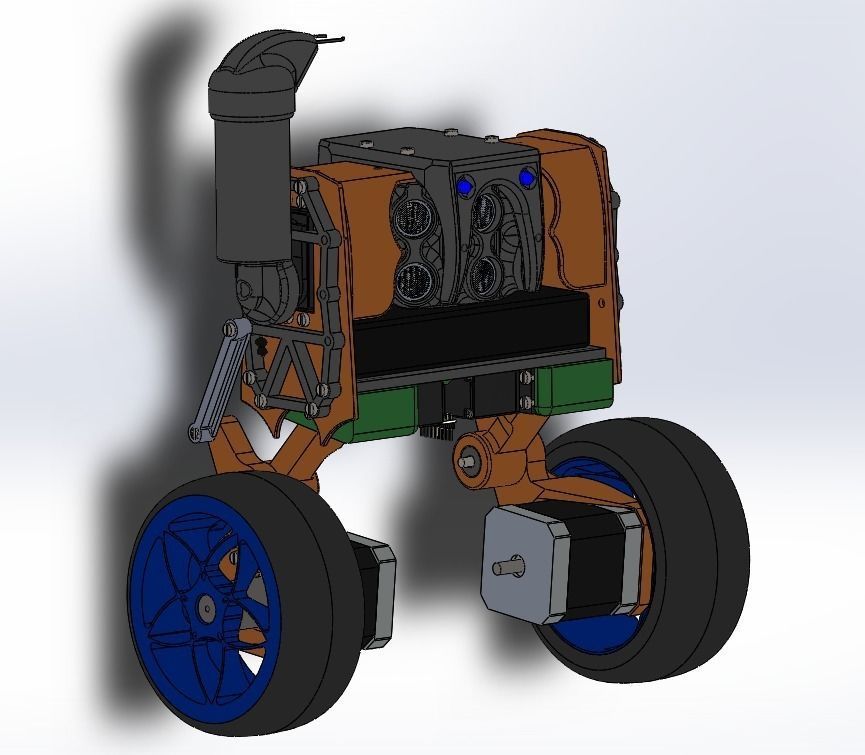
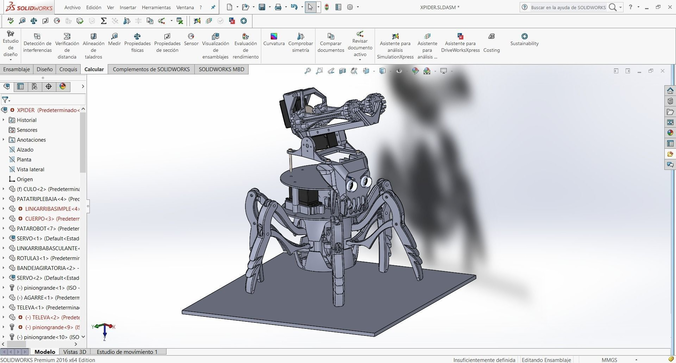
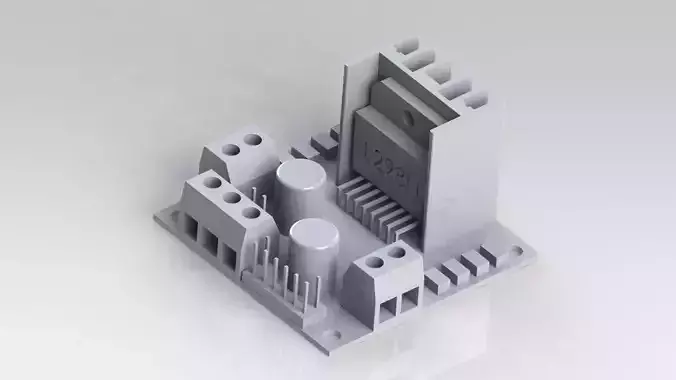
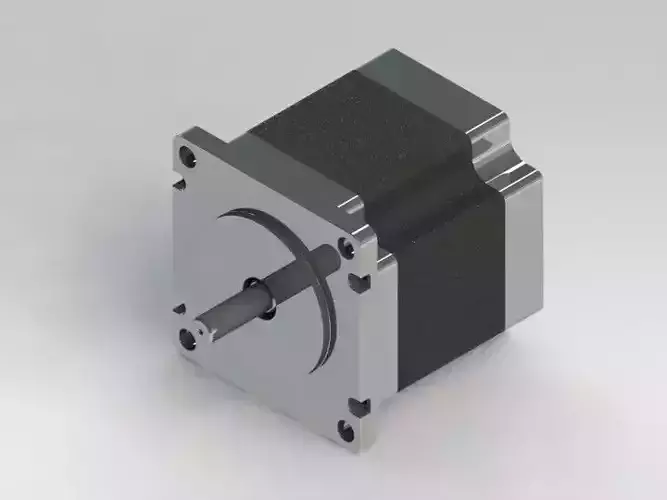
Este es un robot balanceador, tiene también dos piernas con servos para modificar su geometría dependiendo de los movimientos. Utiliza un arduino LEONARDO, un LOLIN WIFI, dos POLOLU DRV8825, un MPU6050, dos motores NEMA17, tres modulos ultrasonidos, dos leds RGB, dos servos MG996 y una batería LIPO 3000mAh 3S, diferentes rodamientos y tornilleria de M3. empresa@penberic.es para el codigo y resolver dudas
This is a balancing robot, it also has two legs with servos to modify its geometry depending on the movements. It uses an Arduino LEONARDO, a LOLIN WIFI, two POLOLU DRV8825, an MPU6050, two NEMA17 motors, three ultrasonic modules, two RGB leds, two MG996 servos and one LIPO 3000mAh 3S battery, different bearings and M3 screws. empresa@penberic.es for the code and solve doubts
https://www.instagram.com/p/BVUwGB2BdwL/?taken-by=penberic3dhttps://www.instagram.com/p/BVNPdzrh8Eq/?taken-by=penberic3d