Battle extraterrestrial cyborg animated 3D model
Battle extraterrestrial cyborg "Devastator". Maya 2014 used standard material.
Maya 2015 used DX11 Shader
You need only to open the file and texture are already connected to it.
3d model consists of:
115 parts combined 58 objects.
all objects are grouped and are named.
Battle robot Subdivision Levels 0
vertex: 36097
Faces: 33902
Tris: 67774
UVs: 37196
Battle robot Subdivision Levels 1
vertex: 139917
Faces: 135578
Tris: 271156
UVs: 142078
Render image preview done in Mental Ray and maya Viewport 2.0, used a standard material.
I am a professional photographer, all the textures and HDRI are made only on the basis of my photos.
All textures have a resolution of 8192x8192
HDRI resolution of 745x360
Includes 10 textures and 1 HDRI: Color map(JPG), normal map(TGA,JPG), specular map(JPG), reflection map(JPG), bump map(JPG), ambient occlusion map(JPG:3 kinds); Gaviti map(JPG), HDRI map(HDR)
Texture is adapted so that it is not visible seams or seams texture masked.
1. The model presented Battle robot may be an element of any design, being the object for imaging in high resolution. 2. This model was designed for use as a real-time asset in a [ videogame or simulation ]. 3. This model corresponds to the size: Height 300 cm Width 134 cm Depth 86.
1unit = 1 centimeter.
To display properly dx11Shader activate this function in the settings Maya
Window > Settings/Preferences > Preferences > display > Viewport 2.0 > rendering engine: DirectX 11 and Default viewport: Viewport 2.0
The camera and lights are not included in the kit.
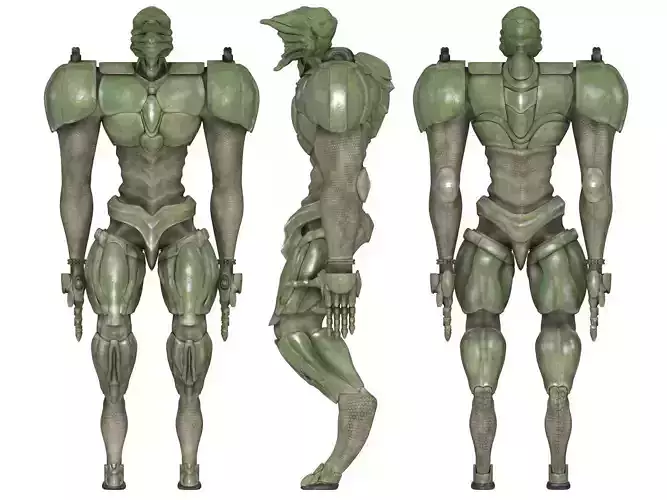
My concept of a military extraterrestrial cyborg
Combat, versatile, autonomous, extraterrestrial cyborg "Devastator".
Universal extraterrestrial cyborg is able to perform a variety of combat missions, both offensive and defensive. Able to act alone and a group of similar robots themselves.
major components of the robot
1. Extraterrestrial cyborg legs are superior human. With this robot is able to move quickly, including cross-country (through the swamp, ice, snow, stone, sand). This helps him special design of the sole, change their properties depending on the type of soil. The robot has a unique jumping ability, in height and in length. 2. The propulsion - hydrogen engine. Special hatch closes to protect the fuel cell. 3. Sensors (visual, wave, thermal, electromagnetic) are located on the head and body of the cyborg. 4. Connector to shoulders for transportation or installation of additional equipment and weapons.