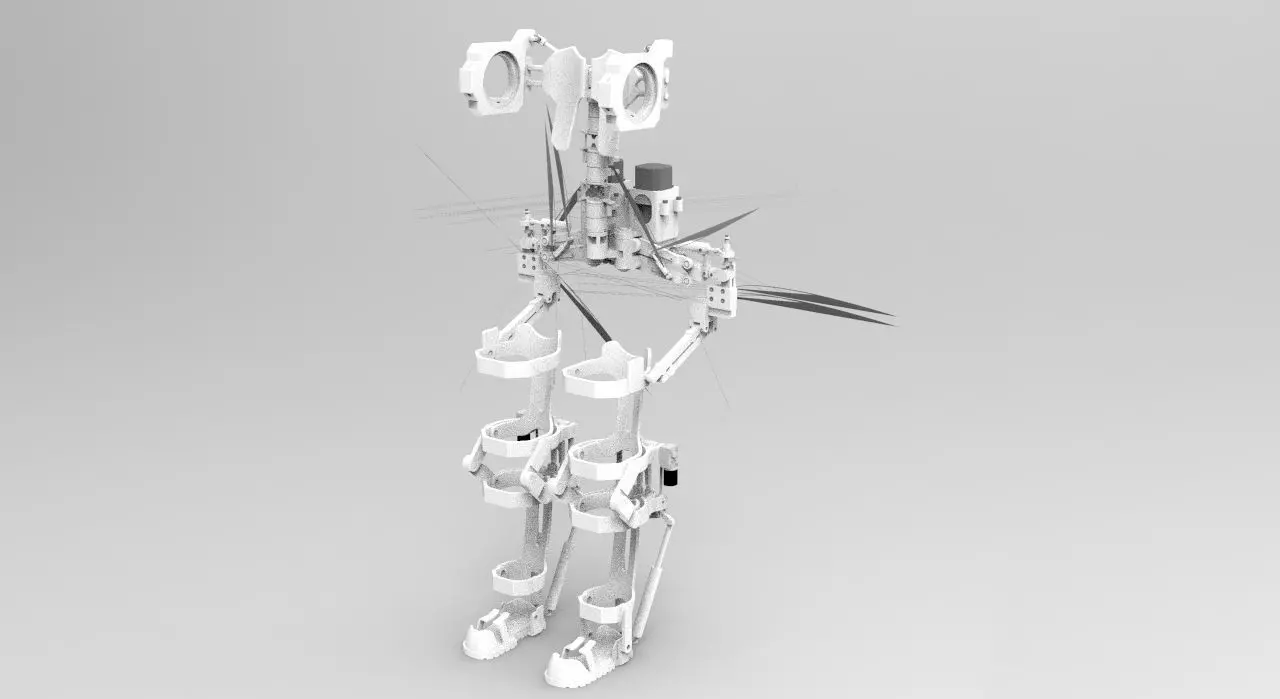
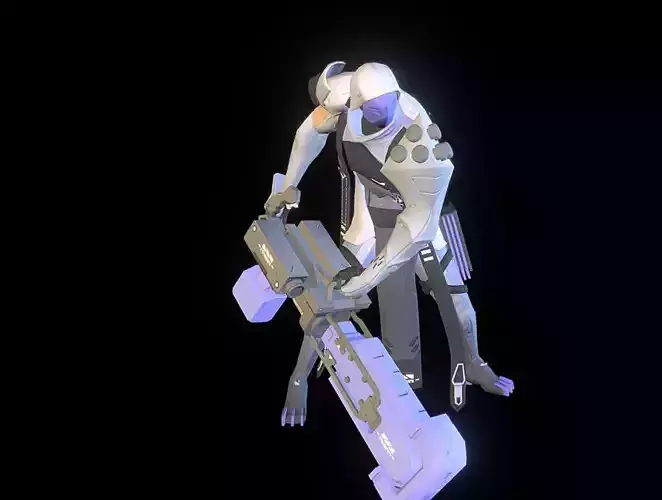
The invention relates to a robot spine structure and an auxiliary exoskeleton device, and belongs to the technical field of auxiliary exoskeletons. Robot spine structure, the spinal column comprises aplurality of spinal column sections, wherein two adjacent spine sections are connected through a universal joint, two first telescopic driving pieces are connected between the two adjacent spine sections, the two first telescopic driving pieces are located on the two sides of the universal joint respectively, and when the two first telescopic driving pieces stretch out or draw back at the same time, the two adjacent spine sections rotate relatively around a first rotating axis; and when one of the two first telescopic driving pieces extends out and the other one retracts, the two adjacent spine sections relatively rotate around the second rotating axis. Multi-directional rotation of two adjacent spine sections can be achieved through the universal joint, when the two first telescopic driving pieces adopt different driving modes, the two adjacent spine sections can correspondingly rotate, different actions of the spine structure are achieved, actions of the spine of the human body aresimulated, the spine structure is flexible in movement, and the movement requirements of a user are met.