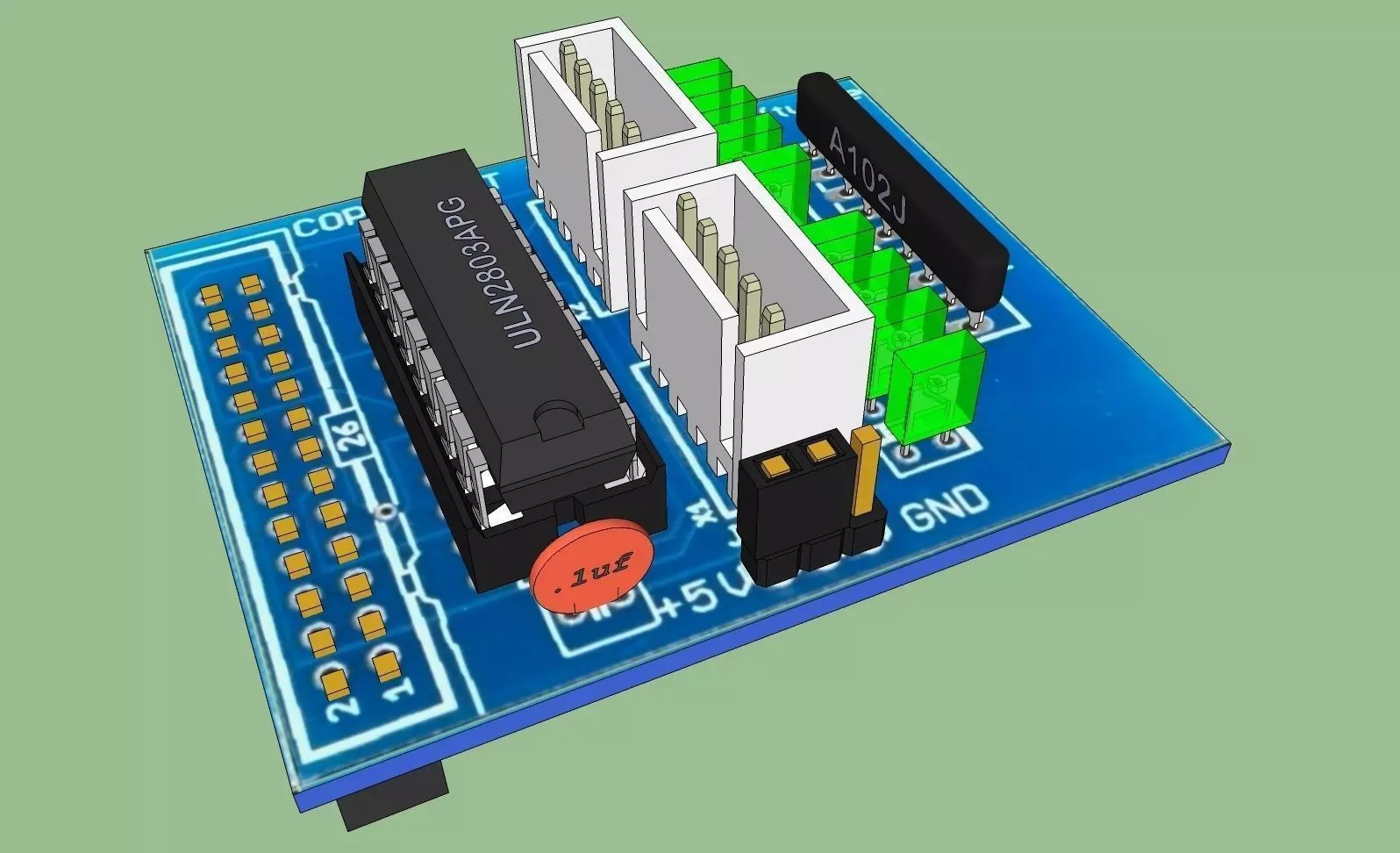
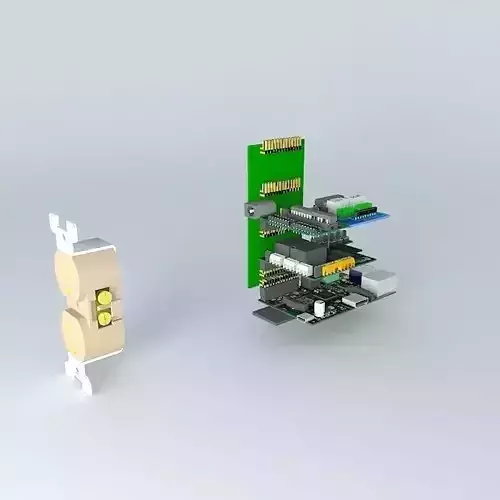
The stepper board uses 8 I/O pins to drive up to two stepper motors.When installing the board be sure to attach the rubber pad to the top of the silver capacitor on the Raspberry Pi board (next to the power plug). This is to prevent the stepper board from shorting to the Raspberry Pi.The jumper shipped with the board allows the stepper motor to use the +5V from the Raspberry PI. If you use a different stepper you can remove the jumper and supply up to 12 volts to the center pin and connect ground to the pin that had no connection.Looking at the board with the LED's closest to you the white connector on the left uses the following bitsWiringPi BCM/GPIO Name0 17 GPIO01 18 GPIO12 R1:21/R2:27 GPIO23 22 GPIO3The second white connector.4 23 GPIO45 24 GPIO56 25 GPIO67 4 GPIO7
Gordon's WiringPi automatically adjusts for which version of the Raspberry Pi you have.To get the highest torque use these bit patterns on the first connector.Turn 0 and 3 on then waitTurn 3 off 1 on then waitTurn 0 off and 2 on then waitTurn 1 off and 3 on then waitTurn 2 off (don't wait) goto top of list