
Project-obj
Cute!






















Additional Services
If you purchase our models, we provide the following customization services at a reasonable fee, allowing you to access our team of top-notch artists for exclusive customizations. Let our extensive years of creative experience enhance your ideas and make your work even more captivating.
+$200-900:Customize a character animation for less than 4 seconds.
+$150:Convert the character to UE5 format, including model, textures, hair, rigging controllers, and animations.
Introduction
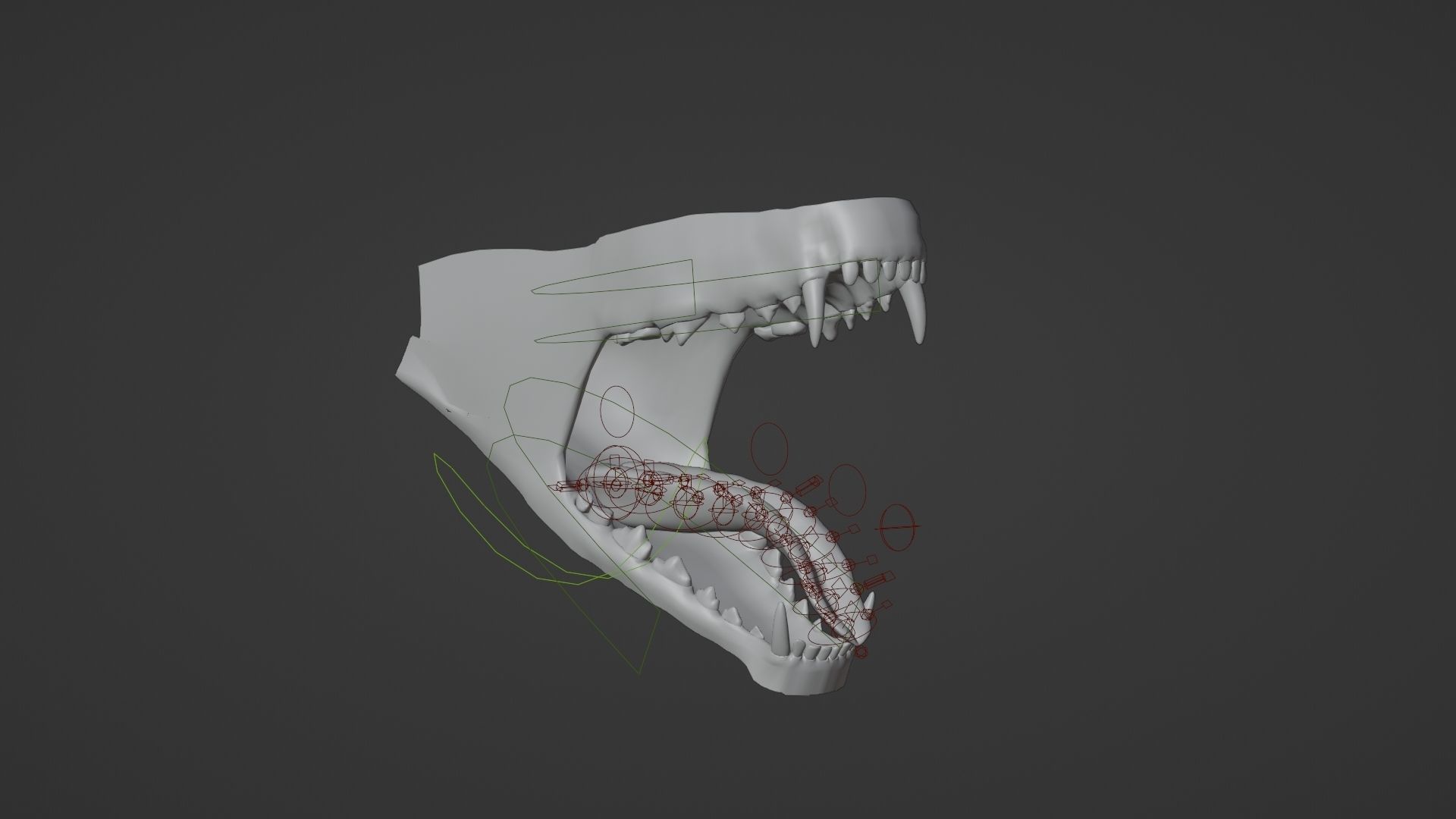
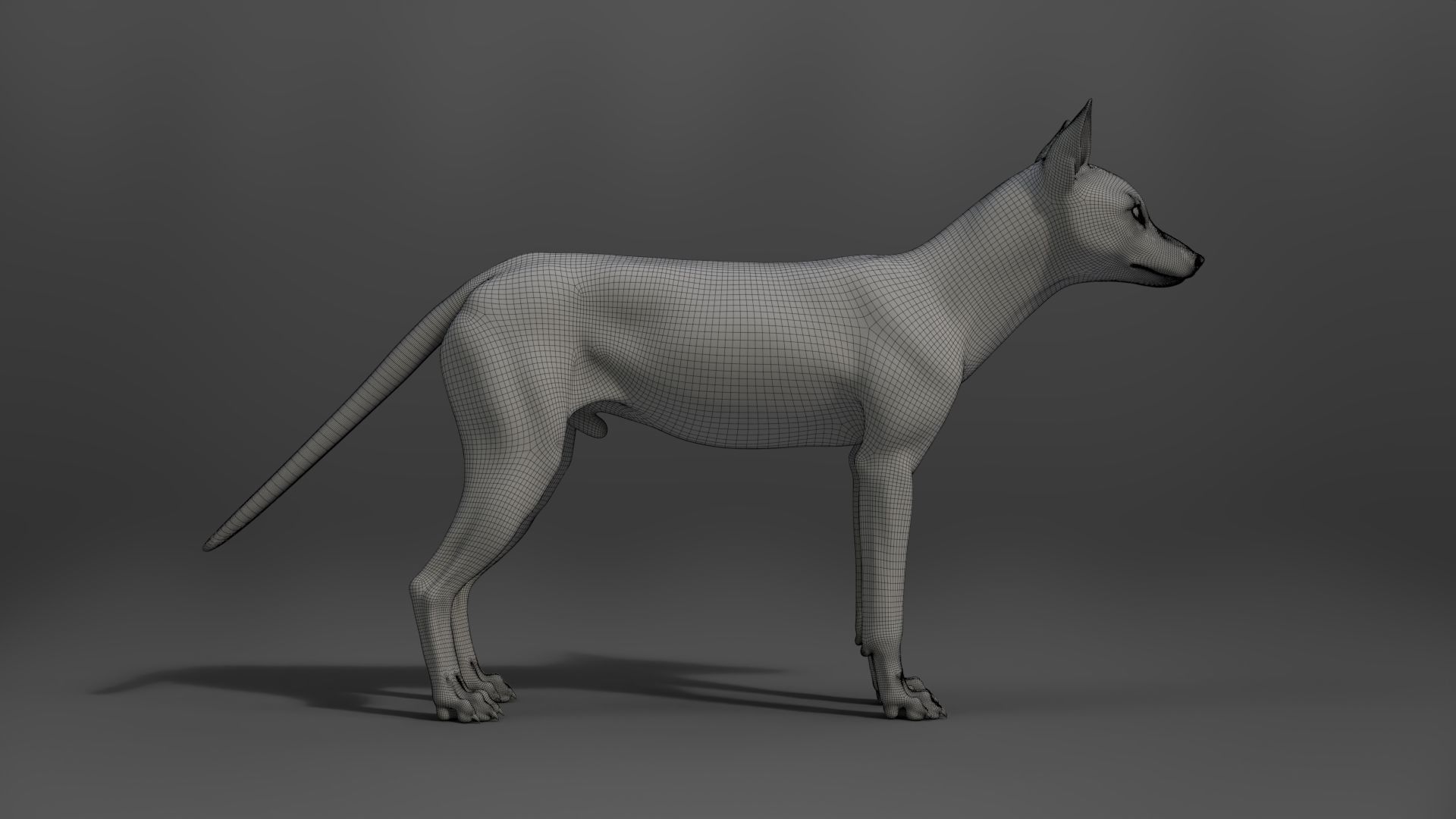
This is a high quality red fox model with UDIM 4K maps, fur, riggings and three realistic animations. The model also has realistic muscle structure and an oral cavity, and a complex fur system is created in Blender to make it realistic. There is also a detailed facial expression control system. This model is made with Blender and Cycles renderer at real-world scale.
It consists of the body, paws, eyelid01, eyelid02, eyes, tongue, teeth.
Polygons
Body: vertices 101,498; polygons 101,496
Paws: vertices 3,120; polygons 3,054
Eyelid01: vertices 452; polygons 448
Eyelid02: vertices 1,356; polygons 1,344
Eyes: vertices 2,184; polygons 2,240
Tongue: vertices 2,714; polygons 2,712
Teeth: vertices 18,271; polygons 18,046
Total: vertices 129,595; polygons 129,340
Formats
There is a Blender project and an OBJ file without rigging or animation.
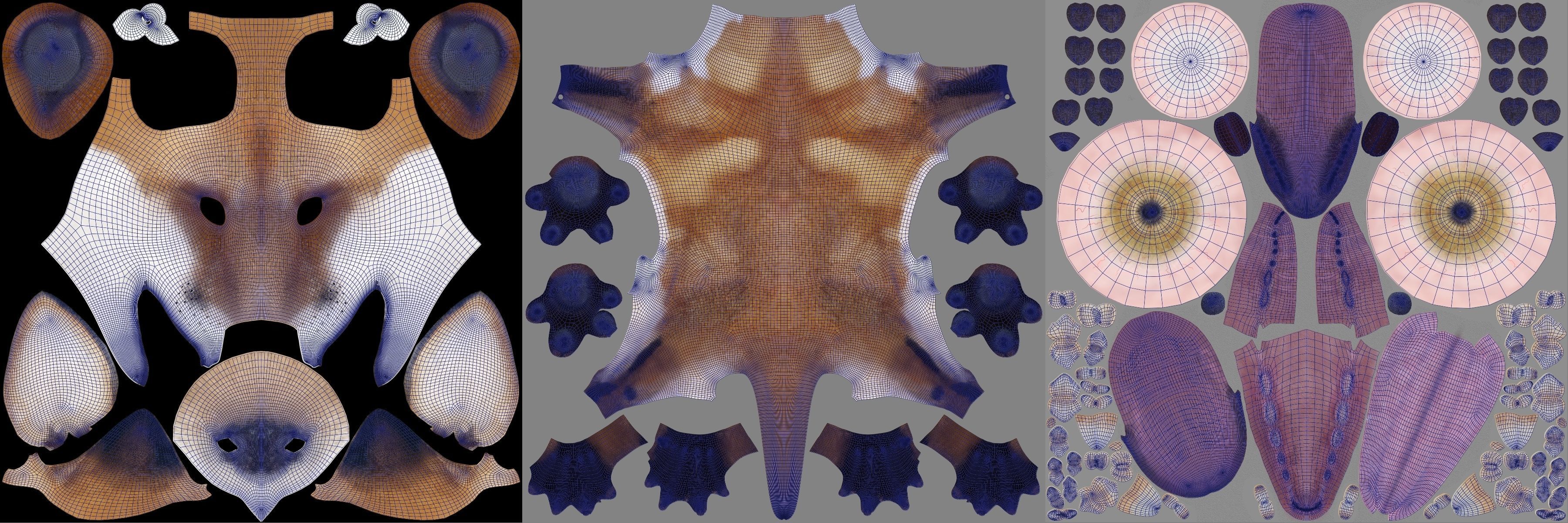
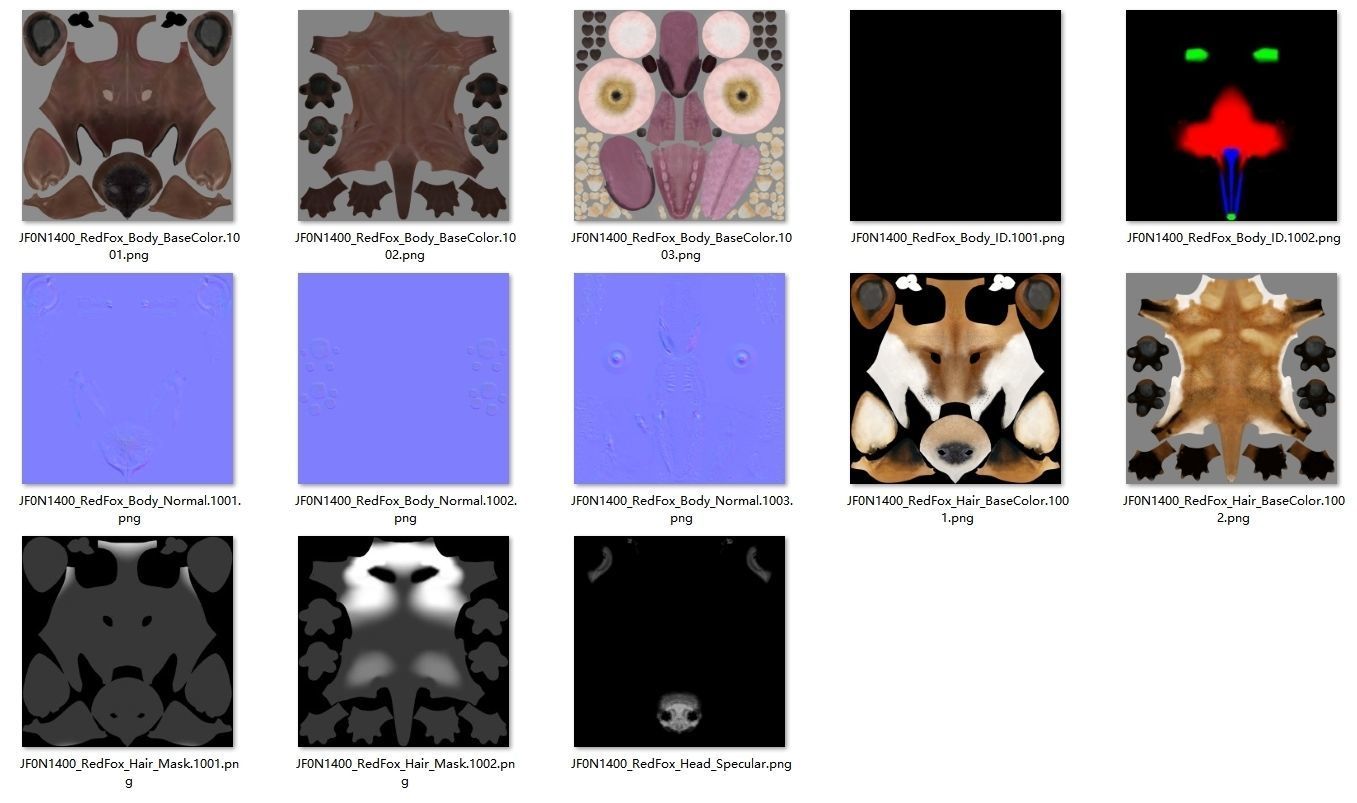
Textures
JF0N1400_RedFox_Body_BaseColor.1001.png, 4096*4096
JF0N1400_RedFox_Body_BaseColor.1002.png, 4096*4096
JF0N1400_RedFox_Body_BaseColor.1003.png, 4096*4096
JF0N1400_RedFox_Body_ID.1001.png, 2048*2048
JF0N1400_RedFox_Body_ID.1002.png, 2048*2048
JF0N1400_RedFox_Body_Normal.1001.png, 4096*4096
JF0N1400_RedFox_Body_Normal.1002.png, 4096*4096
JF0N1400_RedFox_Body_Normal.1003.png, 4096*4096
JF0N1400_RedFox_Hair_BaseColor.1001.png, 4096*4096
JF0N1400_RedFox_Hair_BaseColor.1002.png, 4096*4096
JF0N1400_RedFox_Hair_Mask.1001.png, 2048*2048
JF0N1400_RedFox_Hair_Mask.1002.png, 2048*2048
JF0N1400_RedFox_Head_Specular.png, 4096*4096
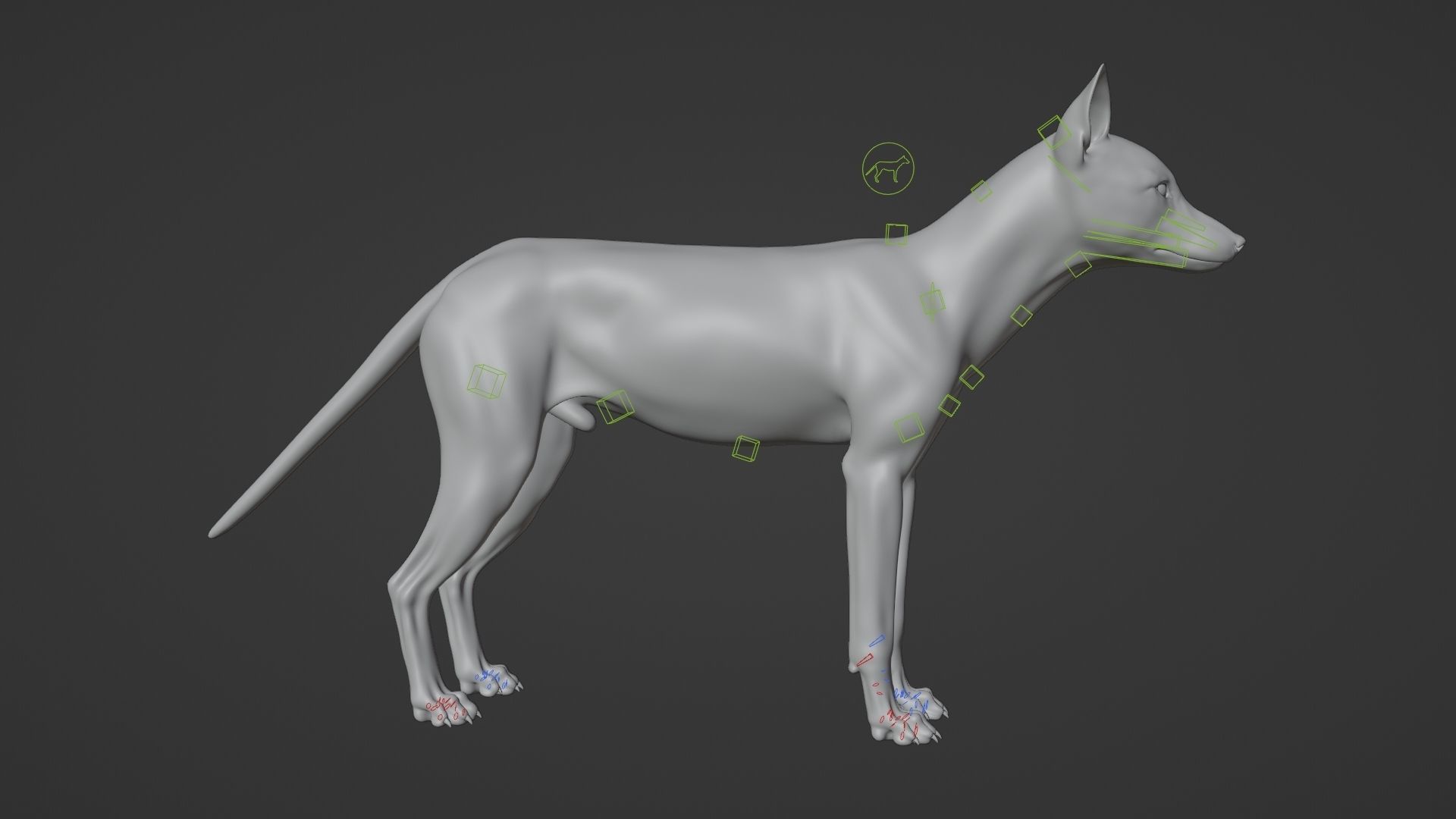
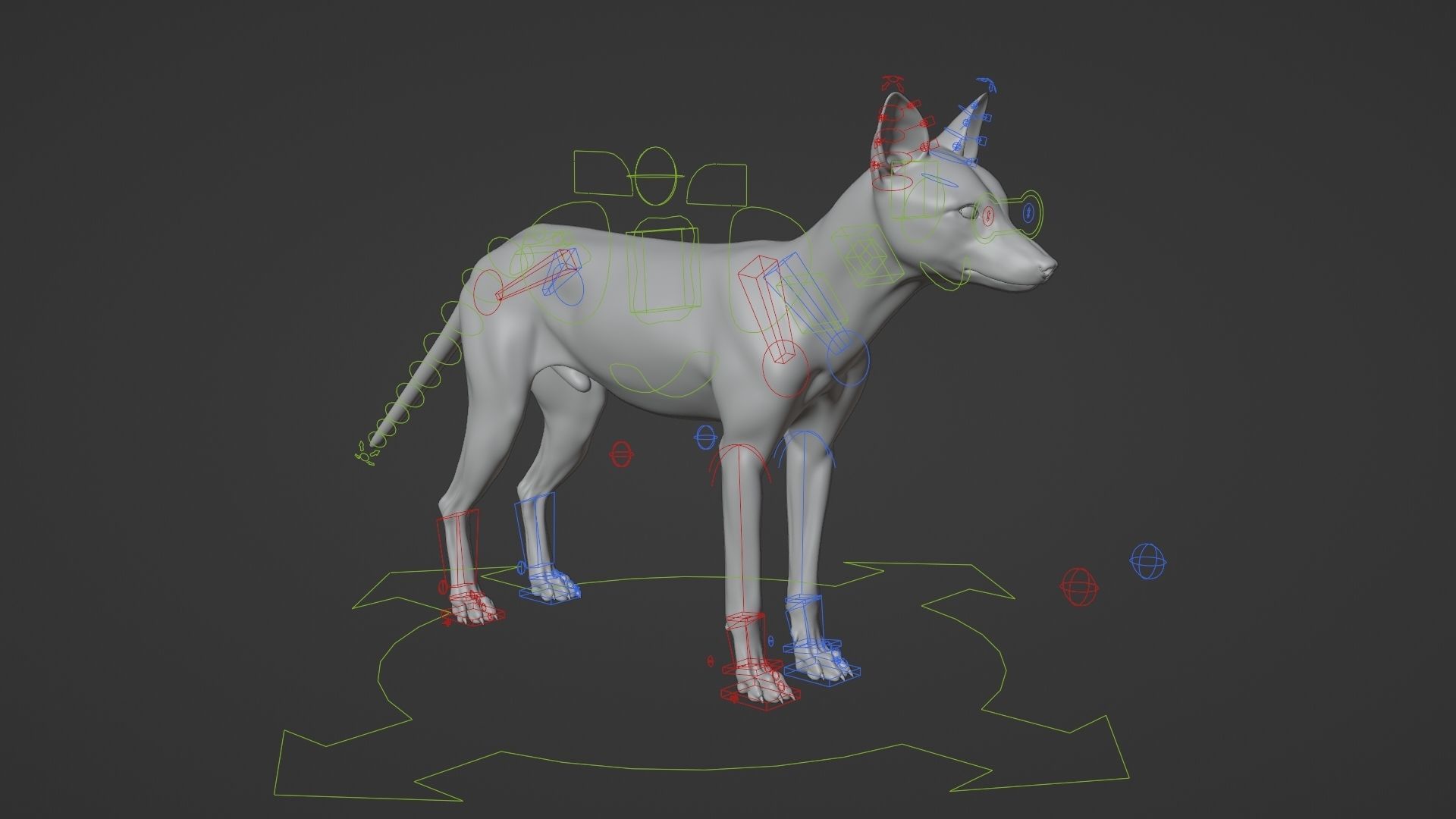
Rigging
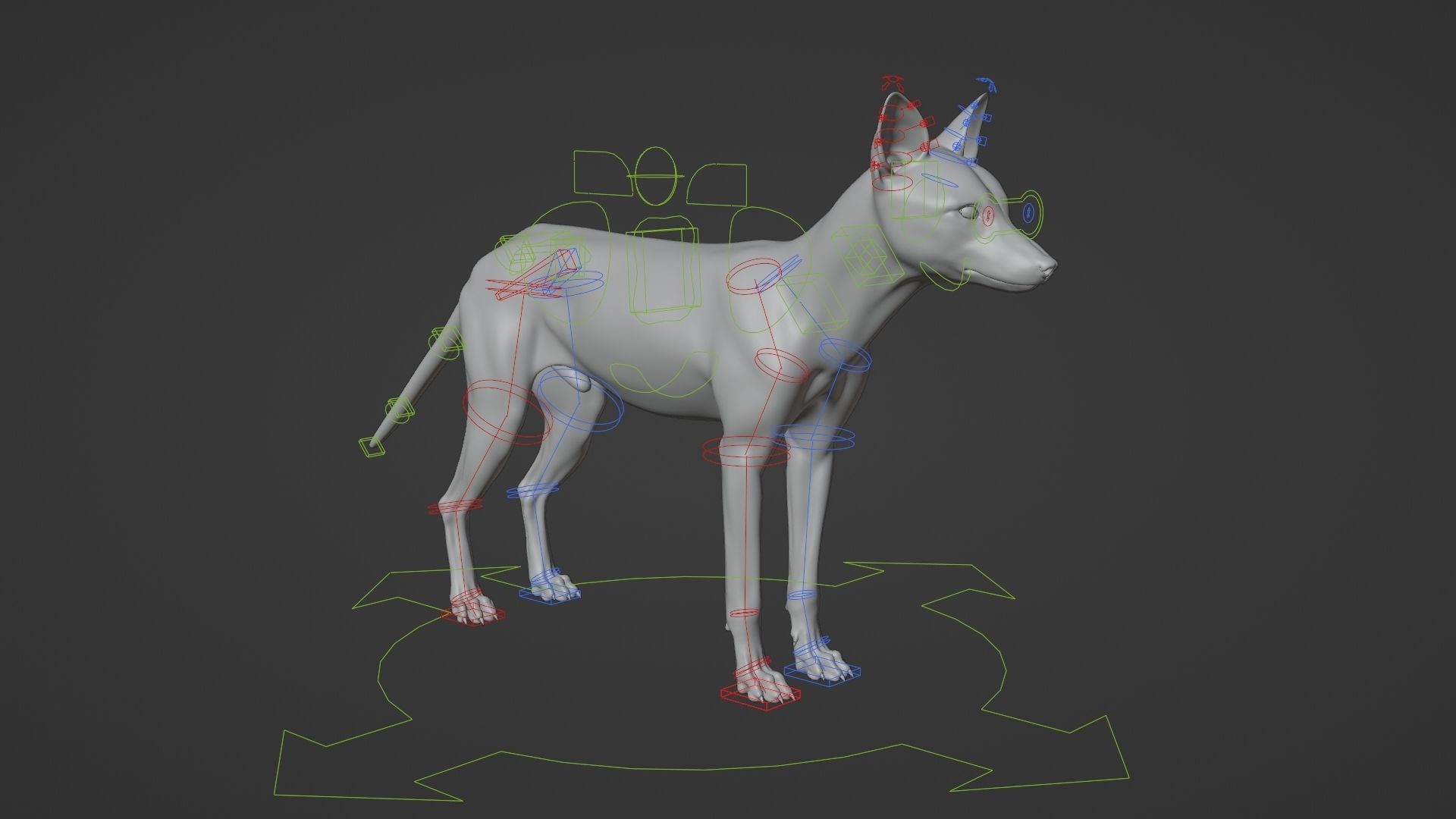
With full controllers, postures and animations are easier to create, the features are as follows:
CTR_Root controls the entire model.
CTR_gravity_f, CTR_gravity_m and CTR_gravity_b control the front, middle and rear center of gravity.
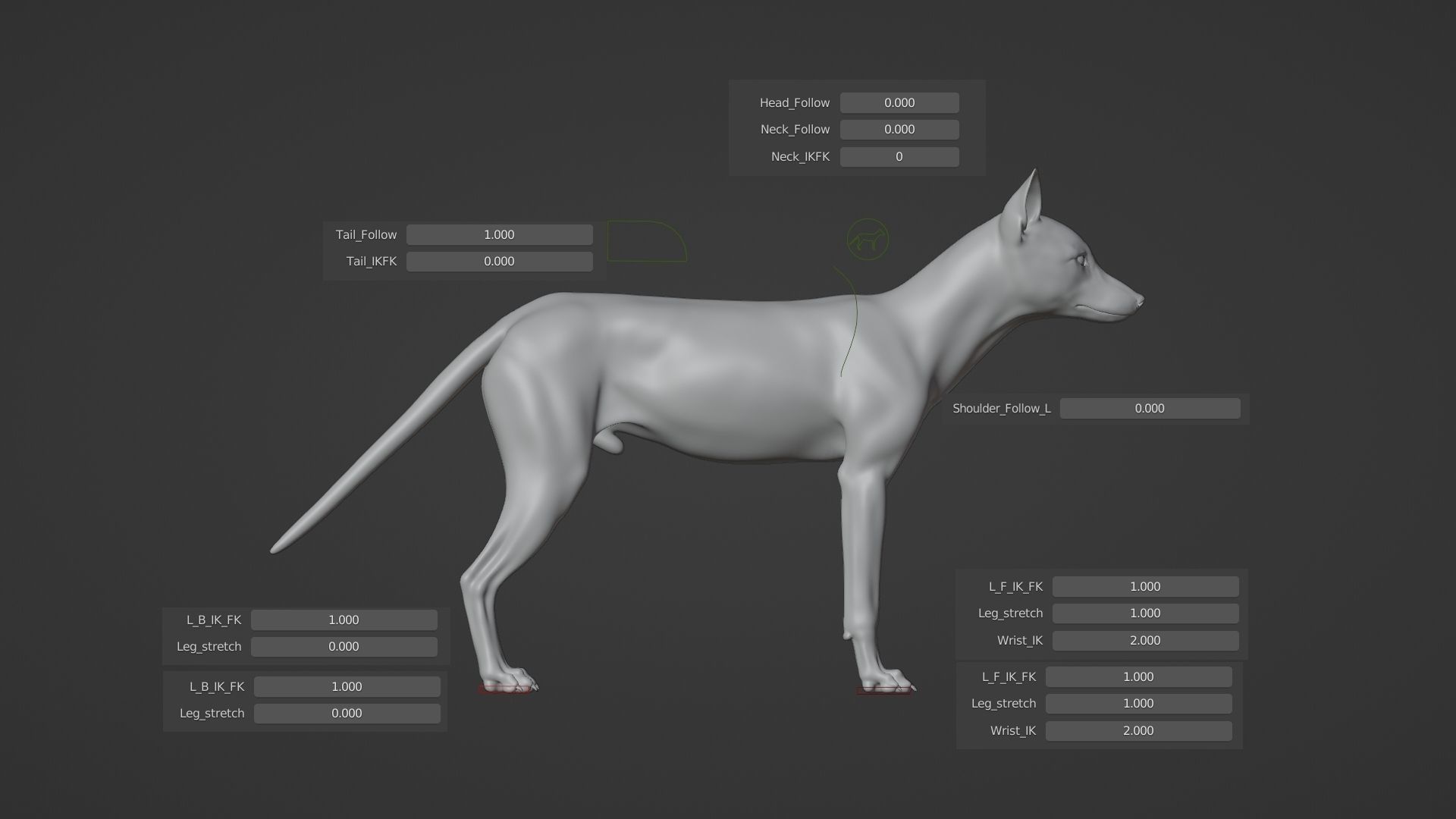
CTR_gravity_b comes with customized attributes:
Tail_Follow controls whether the tail rotates following the center of gravity of the body;
Tail_IKFK switches between IK/FK of the tail non-seamlessly.
CTR_Spine_B controls the rear spine; CTR_spine_m controls the middle spine; CTR_spine_f controls the front spine; CTR_neck_a controls the root of neck; CTR_neck_c controls the head.
When CTR_spine_f is rotating, its customized attribute Shoulder_Follow_L controls whether the shoulders rotate following CTR_spine_f.
CTR_neck comes with multiple customized attributes:
Head_Follow controls whether the head rotates following the parent controller, it only works when Neck_Follow is 1;
Neck_Follow controls whether the neck rotates following the parent controller;
Neck_IKFK switches between IK/FK of the neck non-seamlessly.
CTR_FK_tail_a, CTR_FK_tail_b, CTR_FK_tail_c…… are FK controllers of the tail.
CTR_SplineIK_tail_a, CTR_SplineIK_tail_d, CTR_SplineIK_tail_g…… are IK controllers of the tail.
CTR_venter.001 controls the belly.
CTR_Foot_F.L is the IK controller of the left forefoot. It comes with multiple customized attributes:
L_F_IK_FK switches between IK/FK of the legs non-seamlessly;
Leg_stretch controls whether the legs can be stretched in IK mode;
Wrist_IK switches between different IK modes of the legs, when it's 2, the ankle does not rotate following the IK controller; when it's 3, the ankle rotates following the IK controller.
CTR_Foot_F.R is the IK controller of the right forefoot. It comes with multiple customized attributes:
L_F_IK_FK switches between IK/FK of the legs non-seamlessly;
Leg_stretch controls whether the legs can be stretched in IK mode;
Wrist_IK switches between different IK modes of the legs, when it's 2, the ankle does not rotate following the IK controller; when it's 3, the ankle rotates following the IK controller.
CTR_Foot_B.L is the IK controller of the left hind foot, its customized attribute L_B_IK_FK switches between IK/FK of the legs non-seamlessly; Leg_stretch controls whether the legs can be stretched in IK mode.
CTR_Foot_B.R is the IK controller of the right hind foot, its customized attribute L_B_IK_FK switches between IK/FK of the legs non-seamlessly; Leg_stretch controls whether the legs can be stretched in IK mode.
CTR_Toe_F_motion.L, CTR_Toe_F_motion.R, CTR_Toe_B_motion.L and CTR_Toe_B_motion.R are detailed controllers of the toes. Location on the Y axis controls the extension and flexion of the toes; Location on the Z axis squeezes the paw pad; Rotation over the X axis controls the plantar flexion and dorsiflexion of the paws; Rotation over the Z axis controls the abduction and adduction of the toes.
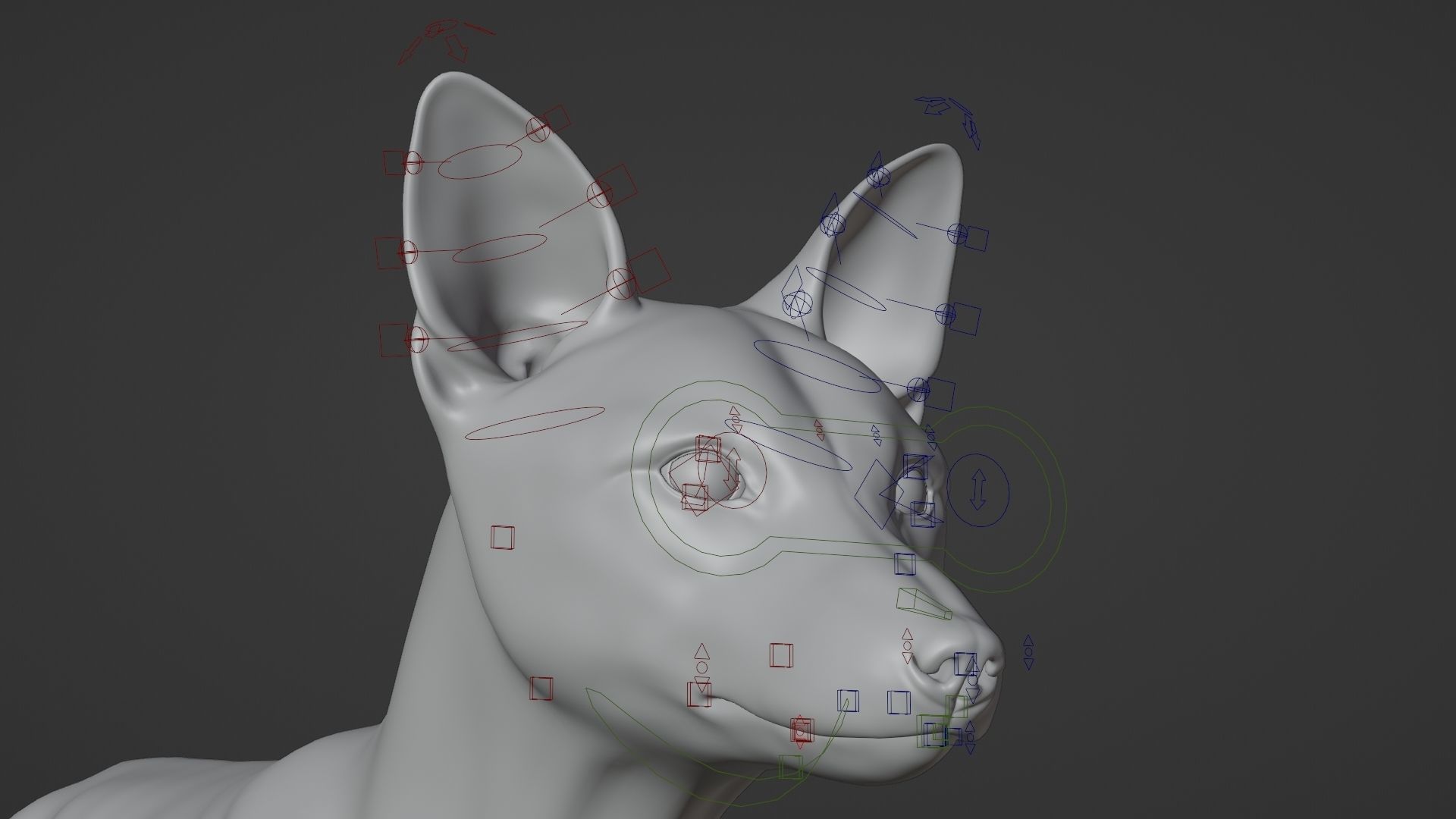
CTR_jaw_master controls the jaw.
CTR_eyes, CTR_eye.L and CTR_eye.R control the eyes.
CTR_eye.L.002 and CTR_eye.R.002 control the winkling.
CTR_eyebrow_b.L, CTR_eyebrow_b.R, CTR_eyebrow_a.L and CTR_eyebrow_a.R are eyebrow controllers.
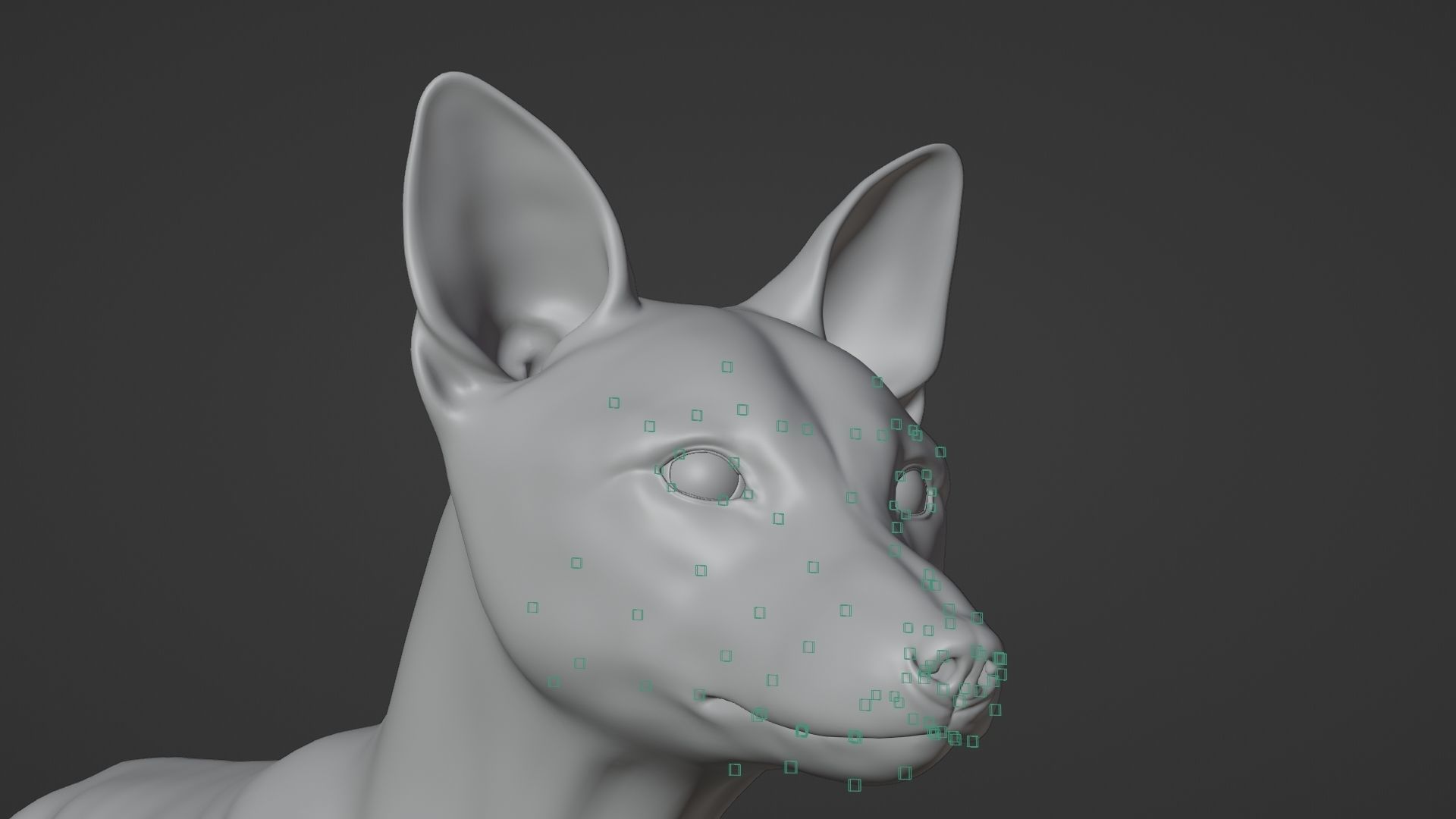
There are complex controllers of the face and tongue, which can create plenty of facial expressions.
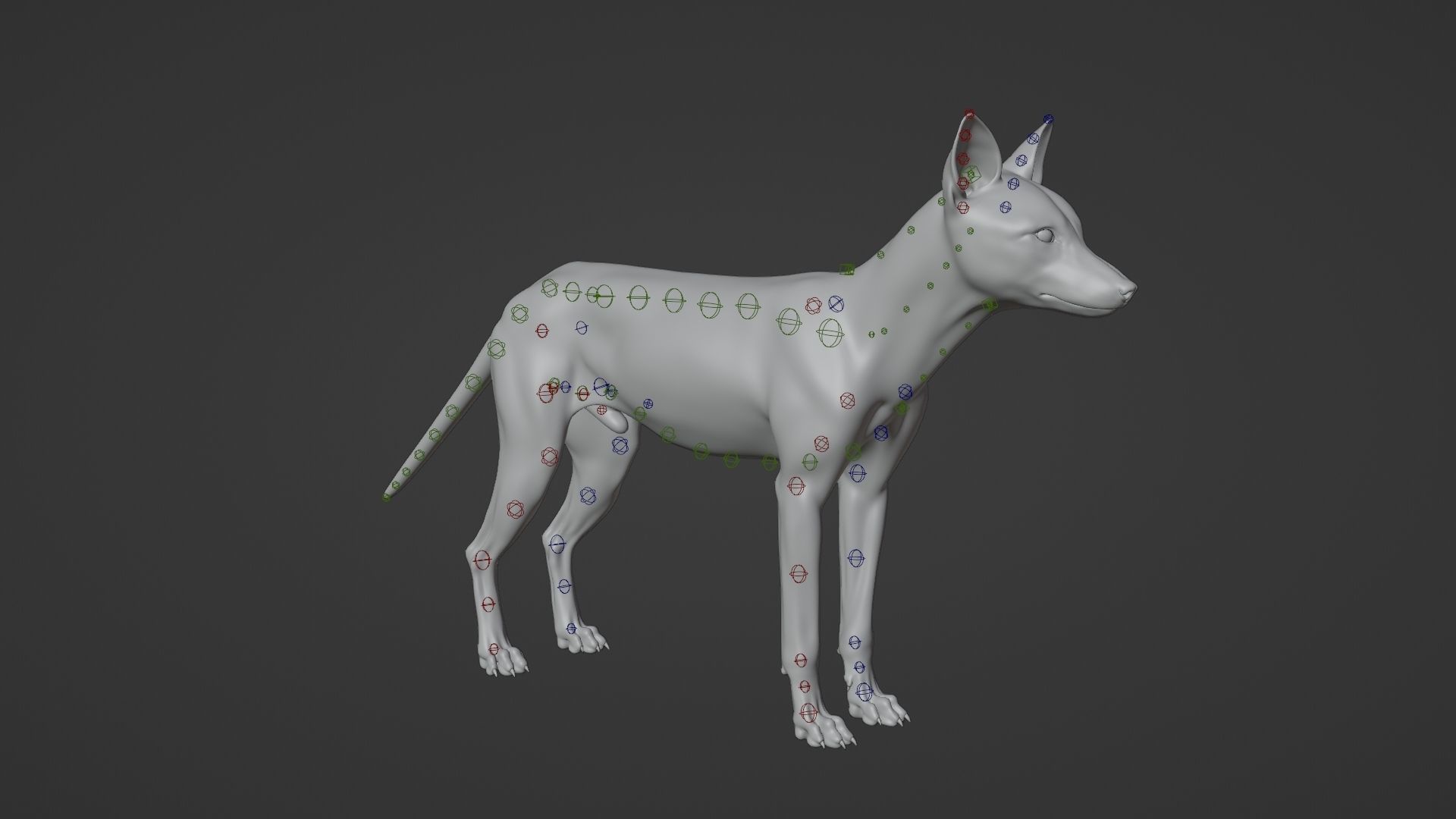
The body comes with more detailed controllers which can create subtle movements.
And more ...
Animations
Loopable trotting animation at 30 fps, frame range 0-140
Loopable walking animation at 30 fps, frame range 0-242
Loopable running animation at 30 fps, frame range 0-12
Features
The model is in meter units at real-world scale.
To run faster, the fur is hidden, with Render enabled.
The model can be rendered in the current project directly.





