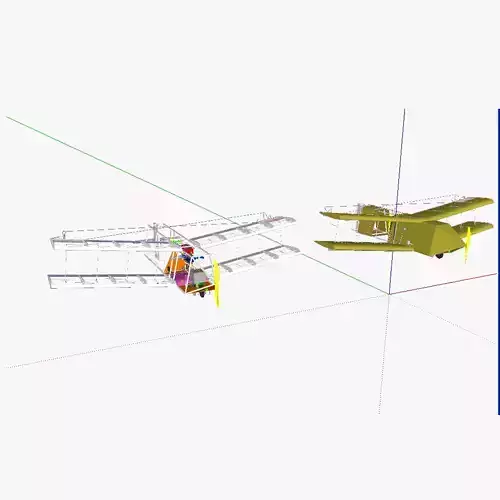
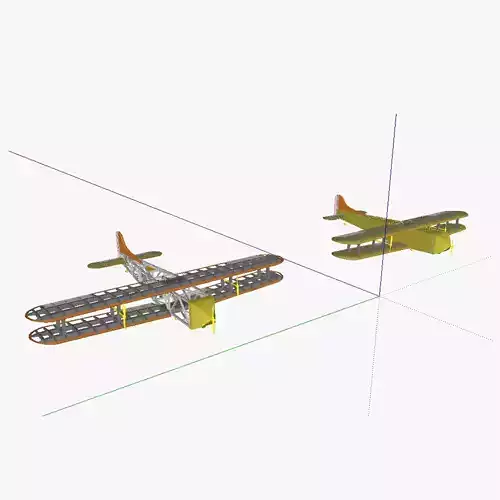
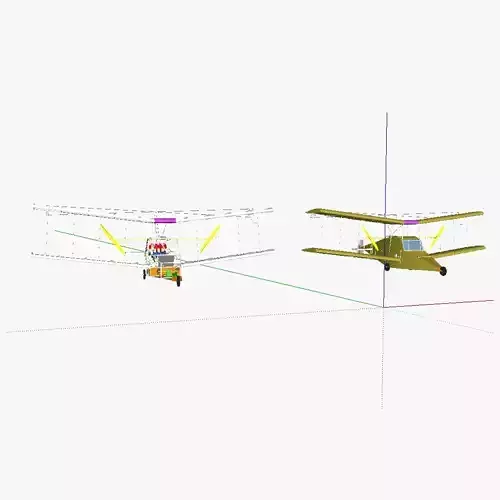
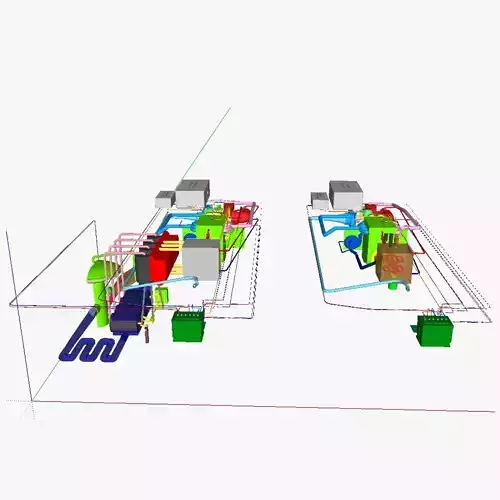
3D model of the UAS (Unmanned aerial system). As the name implies, the aircraft is intented for:
* detection of living organisms (eg birds, mammals, ...) in order to find water sources. Water sources are always marked with a grouping of animals (who come here to drink or eat from the vegetation growing here). These sources may then be used to install a well for the planting of bushes (eg to combat desertification, ...)
* detection of diseased-struck crops and trees
* detection of threats in the vicinity of cities or moving towards cities (eg travelling bandits, armoured vehicles)
* possible gathering of information (remote sensing) on soil contents in order to fertilise efficiently (spot fertilisation).
* possible immobilization of rogue vehicles en route to cities (eg trough a special lighweight spike stripe made of caltrops attached to a lightweight metal cable, canisters filled with KO gas, or even incendiary devices. The latter is only to be done however on vehicles, infrastructure when no people are in the vicinity
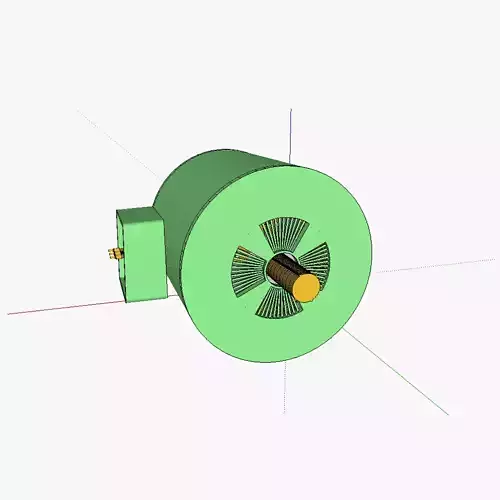
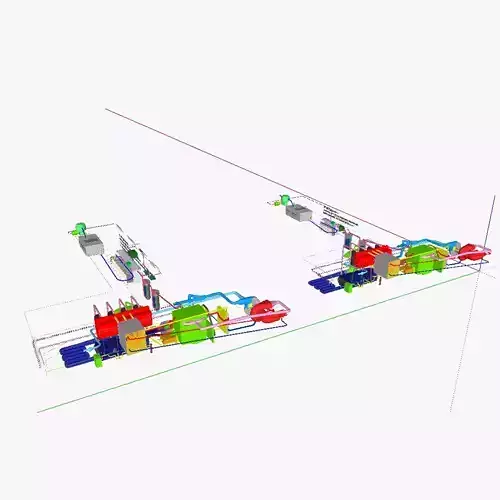
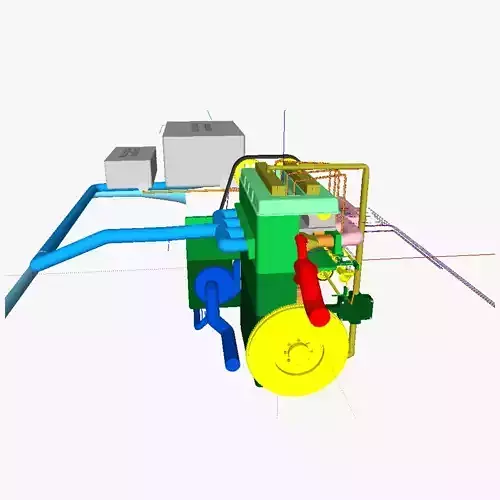
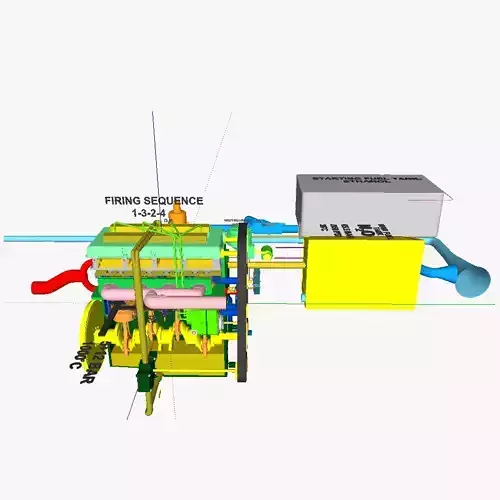
* spraying of disease-infested crops with biodegradable pesticides (e.g. lime sulfur, basalt rock dust, ...). Although not much pesticide can be carried, enough can be stored in tanks to allow spot spraying. Also, the UAS is automated and near zero-polluting, so several runs can be made. The wing profile used is the NACA 43012. Ailerons, rudder and elevator are controlled using wires. No flaps are present. The control is done manually via a remote control stand using a control yoke, pedals and a lever to regulate the speed. Sensors are present on the aircraft to feed additional information to the pilot (ie GPS, height, speed, xyz-stance, fuel level, ...), yet can not be used for an autopilot function (this is not present). Additional sensors can include Short Wave Infrared (SWIR), low-cost mine-clearing radiometry sensors, and Synthetic Aperture Radar (eg NanoSAR, µSAR, ...) Optionals could include Through-The-Wall_Radar_Systems (eg the low-cost micro-Doppler radar, RadarScope, MIT through the wall radar, ...), PF lens for the camera, Laser_designator or other implementations can be added to allow precise delivery of the spike strip, gas canisters on the road, ... In the current model, no levers are present to regulate air/fuel mixture (depending on altitude). Wheel brakes are not foreseen, so taxying is impossible, the airplane needs to be pushed manually. The motor used is a Beta-type Stirling motor. It is heated by a burner running on ethanol (for starting) and later-on on N20 (once the motor is hot enough). The motor is cooled by means of air. Heating and cooling is done independantly for (almost) each individual cylinder (3 valves for 4 cylinders). The valves (green objects in the model) are opened/closed by a PCB. The PCB opens and closes the valves by attaining information of a sensor that records the position of the bottom piston (power piston) of the first cylinder. Using this information, the system also immediatelly knows the position of the pistons of the other cylinders and knows which valves to close/open. The pilot has a lever to change from ethanol to N20, he can do so once he sees the motor temperature is high enough. In this model, no sparkplugs are foreseen, so the motor needs to be started by manually placing a flame near the fuel mouths. A next version could have sparkplugs fitted, and the motor on/off slider (present in this model) is then usable to engage/disengage the sparkplugs. A very light fly